Google fixed Rogue Agent, a Dialogflow CX Code Blocks flaw that could let one writable agent affect every chatbot in a Cloud project.

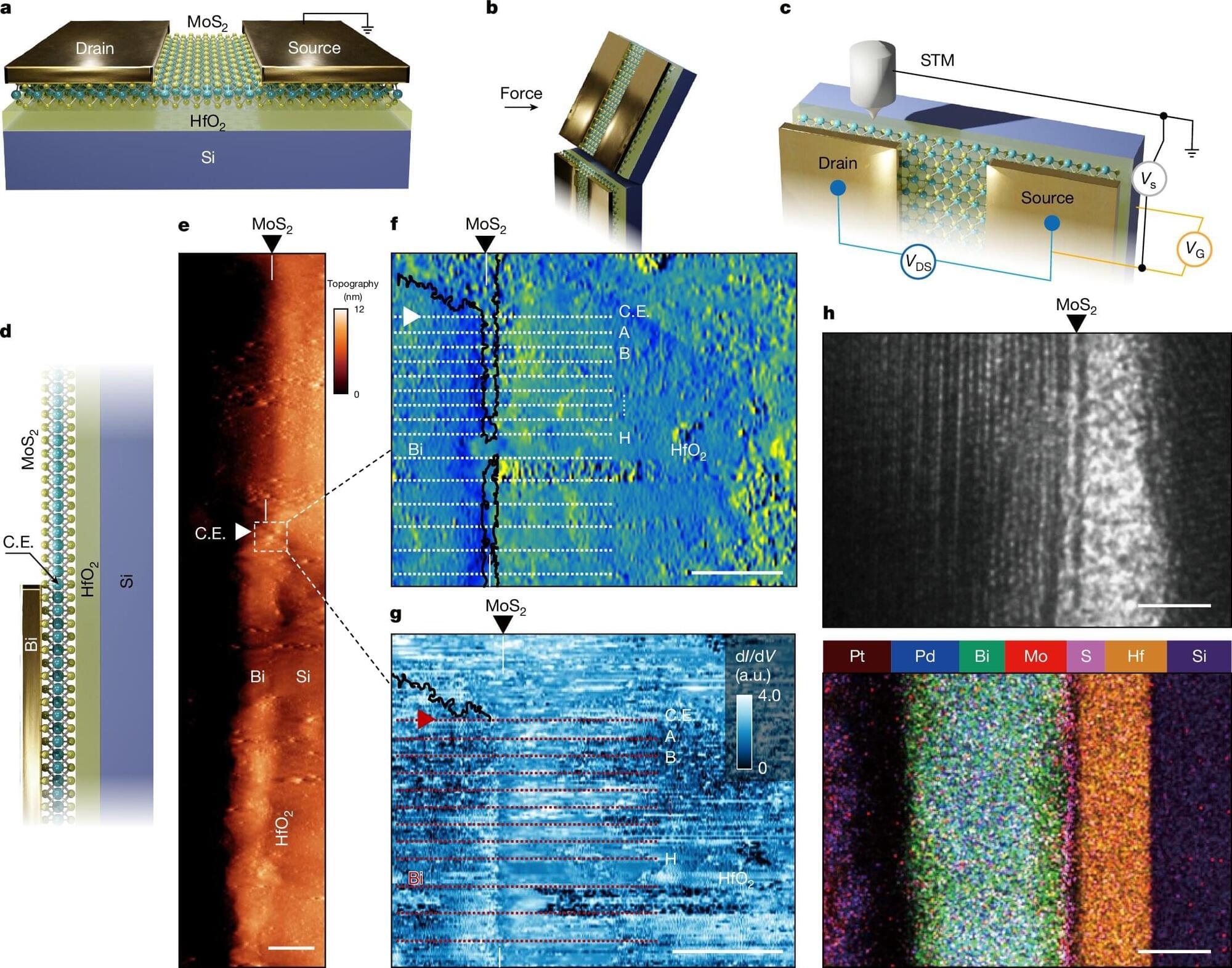
The rise of AI has created an almost insatiable appetite for computing power. Training and running AI systems requires vast numbers of transistors, and engineers are now racing to pack more of them onto every chip. With their existing designs, however, silicon transistors are rapidly running up against physical limits on how small they can get.
Through new research published in Nature, a team led by Ya-Ping Chiu at National Taiwan University has uncovered new details about next-generation transistors that could help push past these limits.
In a paper published in Proceedings of the National Academy of Sciences, researchers from Technion and Tel Aviv University present BetaDescribe, an AI system that translates protein sequences into natural-language descriptions, opening a new path toward understanding protein functions and accelerating drug development and material design.
Protein analysis is essential in medicine and biotechnology, as demonstrated by breakthroughs such as Ozempic, a drug whose development was inspired by a peptide found in the saliva of a rare desert lizard and is used to treat obesity, diabetes and other conditions. However, experimental protein characterization remains a lengthy and expensive process, and even large language models (LLMs) have had limited success in performing this task.
This challenge inspired the development of BetaDescribe, an AI system that converts protein sequences into detailed textual descriptions of their functions and other characteristics. In doing so, the system helps bridge the vast gap between the hundreds of thousands of proteins characterized in the lab and the billions or even trillions that actually exist in nature.
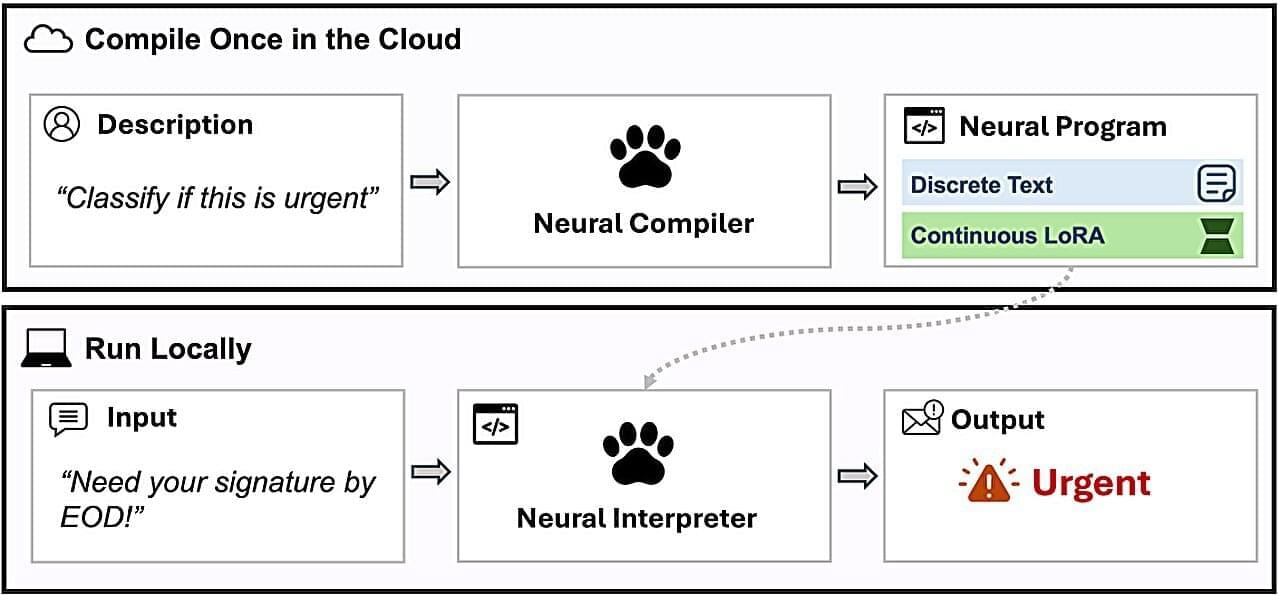
Developers are increasingly relying on large language models (LLMs) for everyday computing tasks such as fixing bugs, explaining code and automating text-processing tasks like filtering logs.
However, it’s not as simple as entering or submitting a question and relying on the model to give you the answer. While humans easily understand these tasks and know exactly what they want, it is difficult to translate them into rigid computer code.
Out of everything happening in your brain right now, only a tiny fraction is consciously accessible — thoughts you can describe, hold in mind, and reason with.
Anthropic found a strikingly similar divide inside their AI model, Claude.
Their experiments were inspired by a leading theory in neuroscience: the global workspace theory. It holds that a thought becomes consciously accessible when it enters a shared “workspace” that’s broadcast across the brain.
They found a set of representations in Claude’s neural activity that play a similar role.

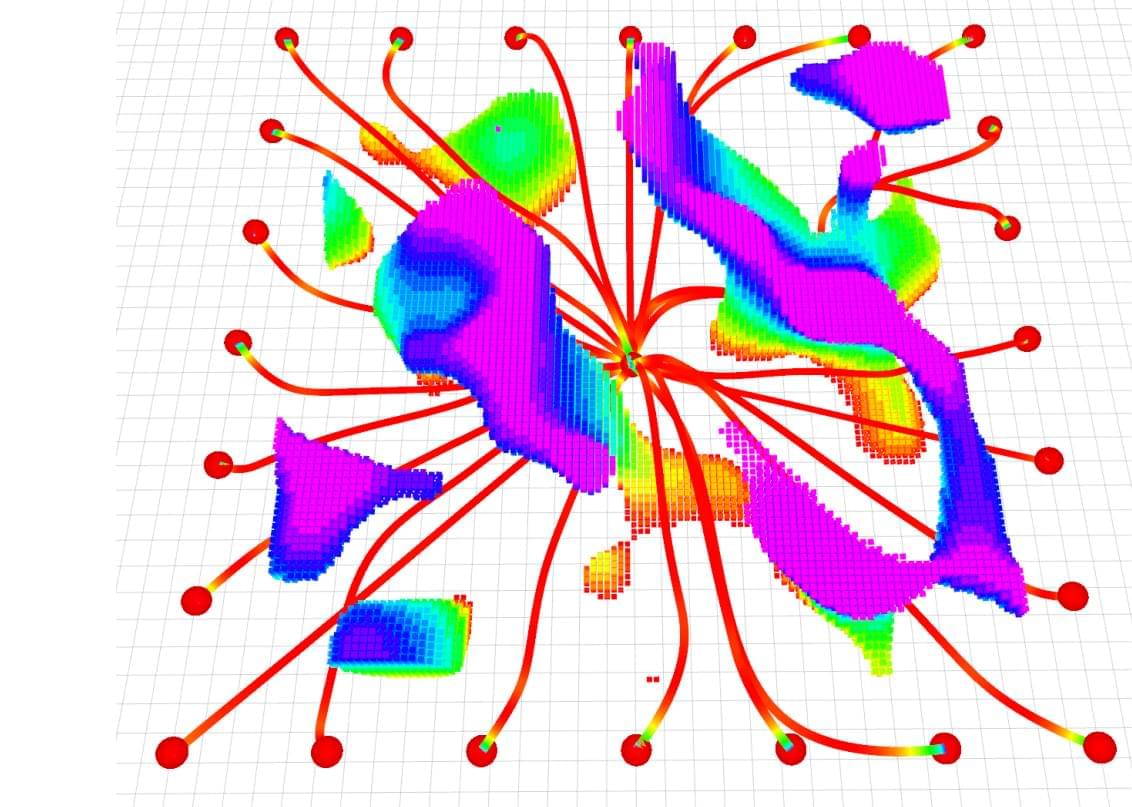
In the aftermath of a devastating earthquake, unpiloted aerial vehicles (UAVs) could fly through a collapsed building to map the scene, giving rescuers information they need to quickly reach survivors.
But this remains an extremely challenging problem for an autonomous robot, which would need to swiftly adjust its trajectory to avoid sudden obstacles while staying on course.
Researchers from MIT and the University of Pennsylvania developed a new trajectory-planning system that tackles both challenges at once. Their technique enables a UAV to react to obstacles in milliseconds while staying on a smooth flight path that minimizes travel time.
How will humanity power its interplanetary future?
In this cinematic documentary, we journey to the year 2,325, where humanity has finally achieved Type I civilization status. We explore the colossal engineering feats required to harvest the Sun’s energy from Mercury and beam it across the entire solar system.
▶A Film by: Scienshell.
In a universe where energy is the currency of survival, the diffused sunlight that has bathed our solar system for 5 billion years is no longer enough. To fuel a true interplanetary empire, humanity must harvest, concentrate, and transmit the immense power of our star. But harnessing such staggering amounts of energy requires pushing the absolute limits of physics and engineering.
As our energy needs grow, the line between theoretical physics and applied engineering begins to blur. For those who build the infrastructure of tomorrow, the solar system itself becomes a machine.
In this video, you’ll discover:
[00:00] Introduction.
[01:29] 2325: The Dawn of a Type I Civilization.
[02:15] Mining Mercury and the Solar Ring Construction.
[06:24] Photons: The Perfect Interplanetary Energy Carriers.
[08:12] The Beating Heart of the Energy Grid.
[11:02] Precursor Beams and Cosmic No-Fly Zones.
[13:01] The Danger of Runaway Gamma Beams.
[15:12] The Gamma Cascade: Converting Destructive Energy.
[17:34] Powering an Interplanetary Civilization.
▶ About This Video.
{kind=link}