Research led by Professor Tobin Filleter (MIE) could benefit industries from automotive to aerospace

Ark Invest forecasts that Tesla’s robotaxi business could reach $10 trillion by 2029, driven by its manufacturing efficiency, data advantage, and strategic positioning in major urban markets ## ## Questions to inspire discussion.
Tesla’s Robotaxi Dominance.
🚗 Q: How significant could Tesla’s robotaxi business become? A: Tesla’s robotaxi business could represent around 90% of its enterprise value by 2029, capturing a substantial share of Ark’s projected $10 trillion global robotaxi market.
🏙️ Q: What’s the potential impact of robotaxis on urban transportation? A: Research suggests 200,000 robotaxis, supplemented by privately owned vehicles in an Airbnb-like model, could meet all of urban Austin’s vehicle miles traveled (VMT) demand, with peak demand requiring 350,000 vehicles.
Manufacturing and Cost Advantages.
🏭 Q: How does Tesla’s manufacturing capability compare to urban demand? A: Tesla’s Austin factory alone could produce more vehicles than urban Austin’s entire ride-hail fleet in approximately 9 days, showcasing its vertically integrated manufacturing advantage.
Questions to inspire discussion.
Autonomy and FSD
🤖 Q: What is the biggest valuation upside for Tesla? A: Tesla’s autonomy roadmap is considered the biggest valuation upside, with the company’s robotaxi plans involving 5-passenger vehicles without a driver seat potentially increasing upside option values for investors.
🚘 Q: How has Tesla’s Full Self-Driving (FSD) system improved? A: FSD has made massive improvements with Version 13, and Version 14 may be the breakthrough moment that pushes Tesla past human-level driving and conquers another three nines of safety.
Future Projections.
📈 Q: What is the expected FSD take rate in the coming years? A: The FSD take rate is projected to increase to 20% in the next few years, with cyber cabs having FSD included, while individual owners may need to opt-in for a while before it becomes standard on all new cars.

US secret military space plane to embark on new mission with undisclosed goal.
Developed by Boeing, the uncrewed spacecraft is used by the U.S. military to conduct experiments in high and low Earth orbits.
Boeing earlier claimed that the space plane is equipped with state-of-the-art technologies that provide exceptional performance and durability. Its modular design allows for a wide range of experiments and missions, making it a versatile and valuable asset in space exploration.
While it looks like a smaller version of the now-retired space shuttle, the X-37B can’t get into orbit without a boost. For this upcoming mission, it’s hitching a ride on a SpaceX Falcon 9 rocket inside the rocket’s fairing, a protective enclosure made of carbon composite that keeps it safe during the launch until it’s ready to be released into orbit, reported ABC News.

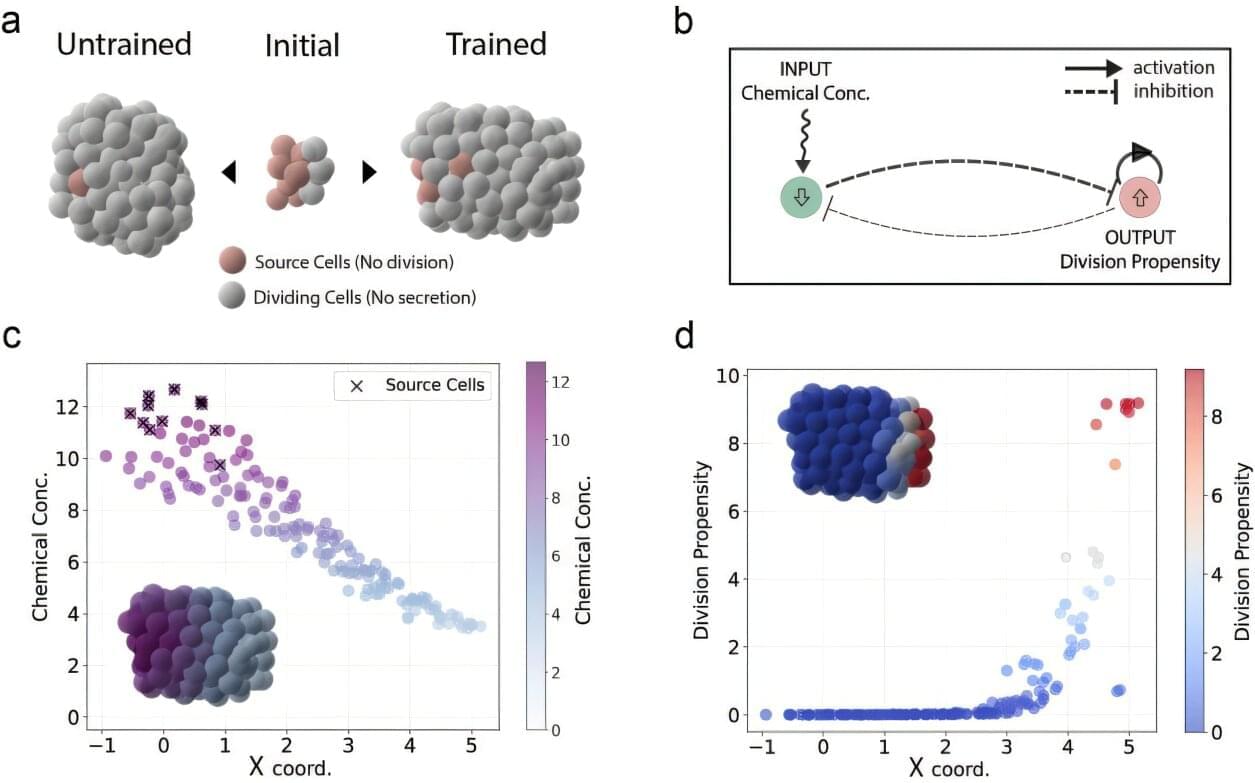
One of the most fundamental processes in all of biology is the spontaneous organization of cells into clusters that divide and eventually turn into shapes—be they organs, wings or limbs.
Scientists have long explored this enormously complex process to make artificial organs or understand cancer growth—but precisely engineering single cells to achieve a desired collective outcome is often a trial-and-error process.
Harvard applied physicists consider the control of cellular organization and morphogenesis to be an optimization problem that can be solved with powerful new machine learning tools. In new research published in Nature Computational Science, researchers in the John A. Paulson School of Engineering and Applied Sciences (SEAS) have created a computational framework that can extract the rules that cells need to follow as they grow, in order for a collective function to emerge from the whole.
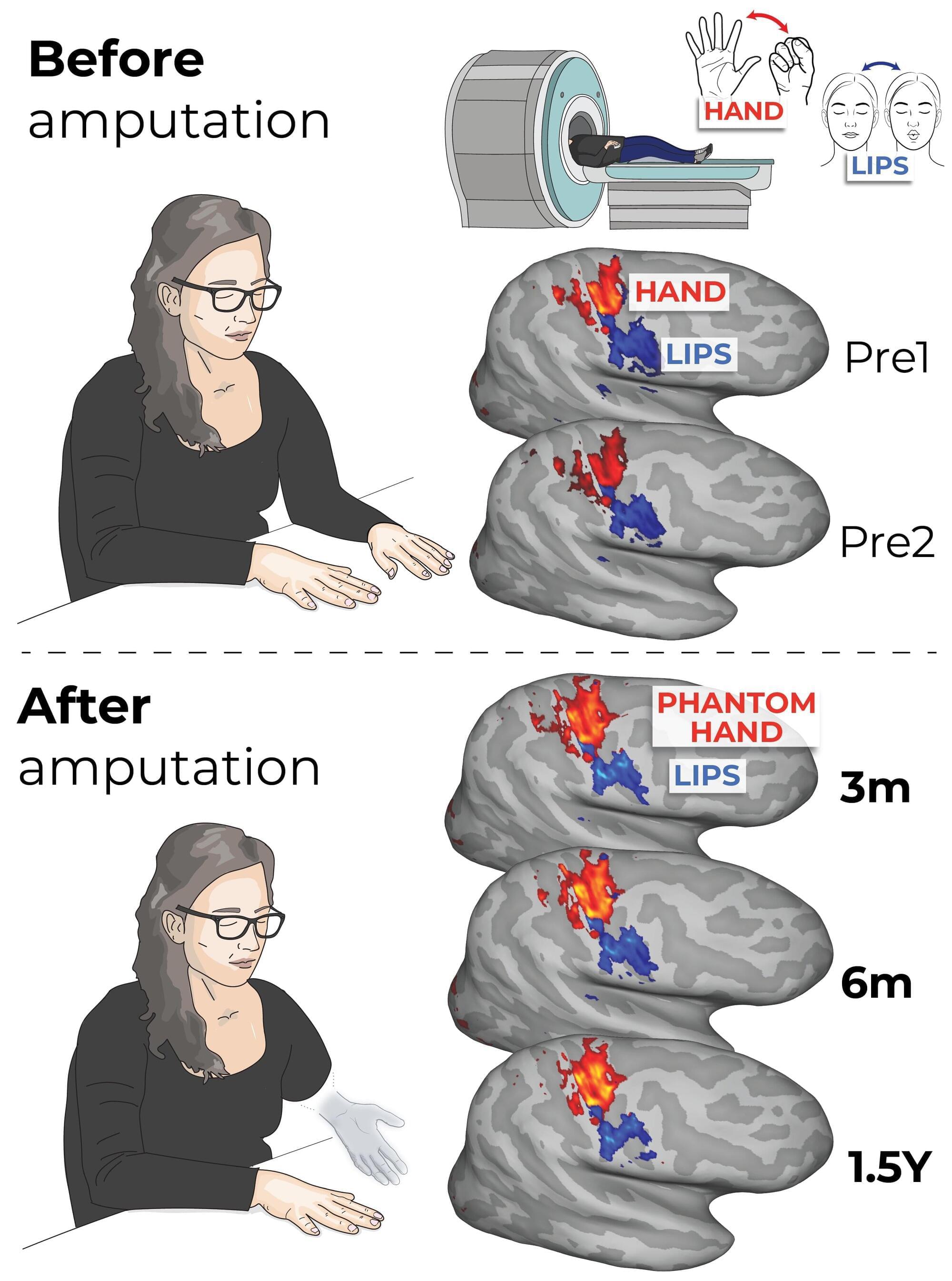
The brain holds a “map” of the body that remains unchanged even after a limb has been amputated, contrary to the prevailing view that it rearranges itself to compensate for the loss, according to new research from scientists in the UK and US.
The findings, published in Nature Neuroscience, have implications for the treatment of “phantom limb” pain, but also suggest that controlling robotic replacement limbs via neural interfaces may be more straightforward than previously thought.
Studies have previously shown that within an area of the brain known as the somatosensory cortex there exists a map of the body, with different regions corresponding to different body parts.

{kind=link}