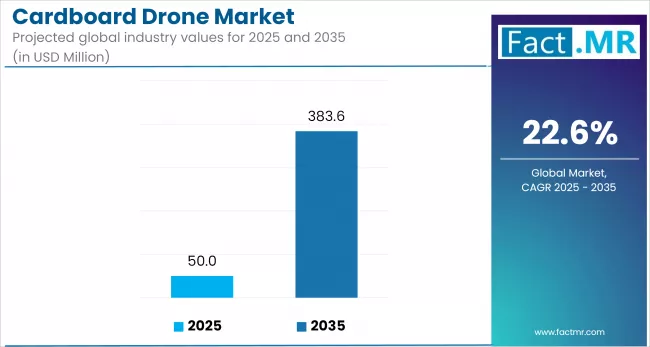
The global cardboard drone market is projected to expand from an estimated $50 Mn in 2025 to a substantial $384 million by 2035, driven by a 22.6% CAGR.


A new military test has showcased potential that large drones can work as motherships for smaller loitering munitions. The plan could get a push following a recent air launch of a Switchblade 600 loitering munition (LM) from a General Atomics’ Block 5 MQ-9A unmanned aircraft system (UAS).
It marked the first time a Switchblade 600 has ever been launched from an unmanned aircraft.
The flight testing took place from July 22–24 at the U.S. Army Yuma Proving Grounds Test Range.

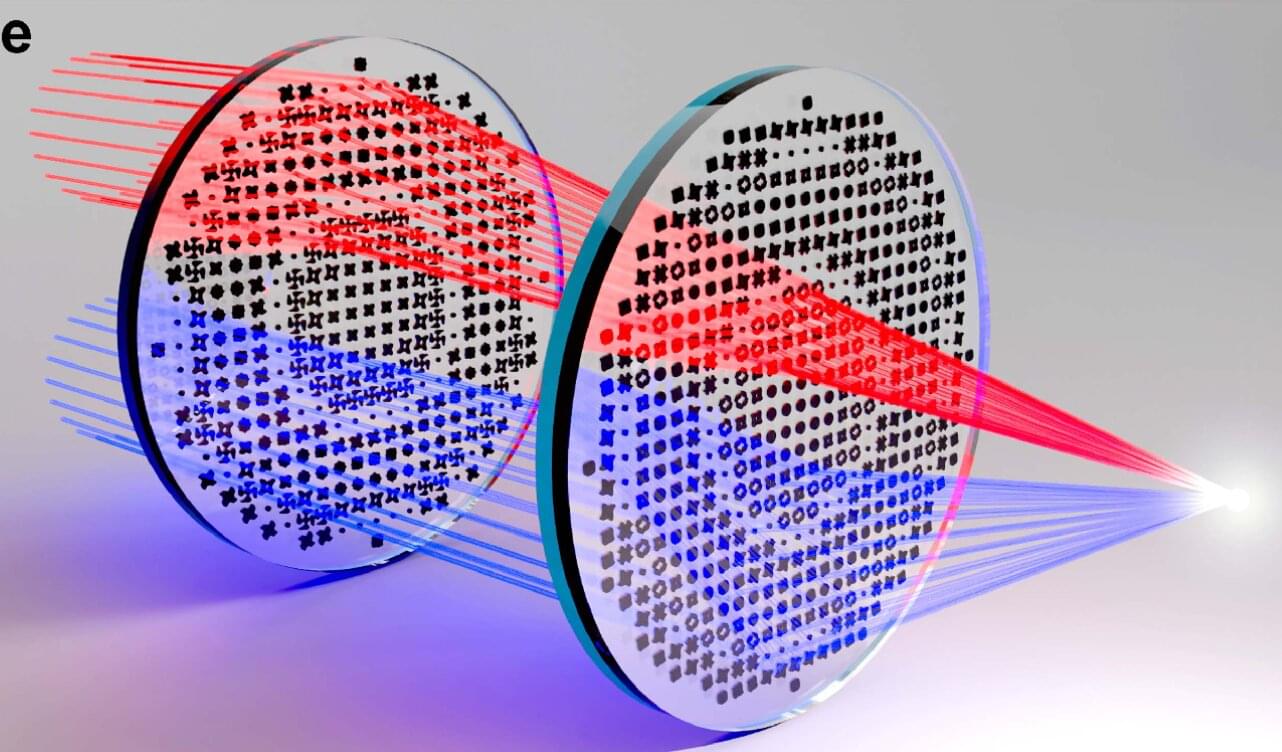
A new approach to manufacturing multicolor lenses could inspire a new generation of tiny, cheap, and powerful optics for portable devices such as phones and drones.
The design uses layers of metamaterials to simultaneously focus a range of wavelengths from an unpolarized source and over a large diameter, overcoming a major limitation of metalenses, said the first author of the paper reporting the design, Joshua Jordaan, from the Research School of Physics at the Australian National University and the ARC Center of Excellence for Transformative Meta-Optical Systems (TMOS).
“Our design has a lot of nice features that make it applicable to practical devices.”
Report.
A closer look at one widely shared online image shows the vessel dwarfing a four-lane road in Beijing, implying that it likely stretches more than 15 meters (49 feet) in length. Its size, combined with the angular, stealth-oriented design and cockpit windows, indicates that the craft could accommodate either sophisticated onboard equipment or a small crew.
Preparations for a massive military parade in the capital are in full swing as the country readies to mark the 80th anniversary of the end of World War II, celebrated as Victory Day. The third major rehearsal ran from 5 p.m. Saturday to 5 a.m. Sunday in Tiananmen Square, state news agency Xinhua reported.
The uncrewed surface vehicle featured in China’s official military parade indicates it has already entered active service. The vessel is significantly smaller than the “Killer Whale” a larger surface stealth drone that was unveiled at the Zhuhai Airshow last year, the South China Morning Post reported.
Questions to inspire discussion.
🤖 Q: What is Tesla’s vision for autonomous vehicles? A: Tesla is prioritizing a robo taxi future with Cybercab and potentially Robovan, likely to focus on producing robo vehicles over traditional cars in the near future.
📊 Q: How does the Model Y L fit into Tesla’s robotaxi plans? A: The Model Y L would be a good fit for the robo taxi network, offering a bigger car with more versatility that people want, even if they don’t need the space, and would be a hot seller in the US market.
Tesla’s Full Self-Driving Progress.
🚀 Q: How close is Tesla to achieving full self-driving? A: With version 14 of FSD almost complete and version 15 likely to be the final needed version within a year, Tesla is expected to fully commit to the robo taxi future.
🏢 Q: How has Tesla’s leadership approached the robotaxi strategy? A: Tesla’s executives previously resisted Elon Musk’s push to bet the company on robo taxis, but are now likely to fully commit given the progress in FSD development.
The remotely-operated robot tank is an old idea…’
Unmanned Boats Attack At Sea ‘The autofreighter smashed into the boat…’
Iron Drone Raider Counter-UAV Operations ‘You’ve got an aggressive machine up in the air now.’ — Robert Sheckley, 1953.
Bunker Busters and Bore-Pellets ‘The first revelation of the new Soviet bore-pellets.’ — Philip K. Dick, 1955.

{kind=link}
{kind=link}