Try InVideo AI for free here: https://invideo.io/i/ArvinAsh This will save you hundreds of dollars that you would otherwise spend on editing, animating and other production costs.
Talk to ME (ARVIN) on Patreon and More:
/ arvinash.
REFERENCES
How the 4 fundamental forces work • Why & How do the 4 fundamental forces of n…
History of atom • The Quantum Mechanical model of an atom. W…
Strong Force • Why Don’t Protons Fly Apart in the Nucleus… https://tinyurl.com/2bqv3b9y
Source of mass • How Can MASS and ENERGY be the Same Thing?… https://tinyurl.com/29crnzy2
Medium article https://tinyurl.com/2by2sdbq
Weak Force https://tinyurl.com/25gp9ty7
CHAPTERS
0:00 Why Universe is inside an Atom
1:29 What is an atom?
4:44 Louis de Broglie finds waves!
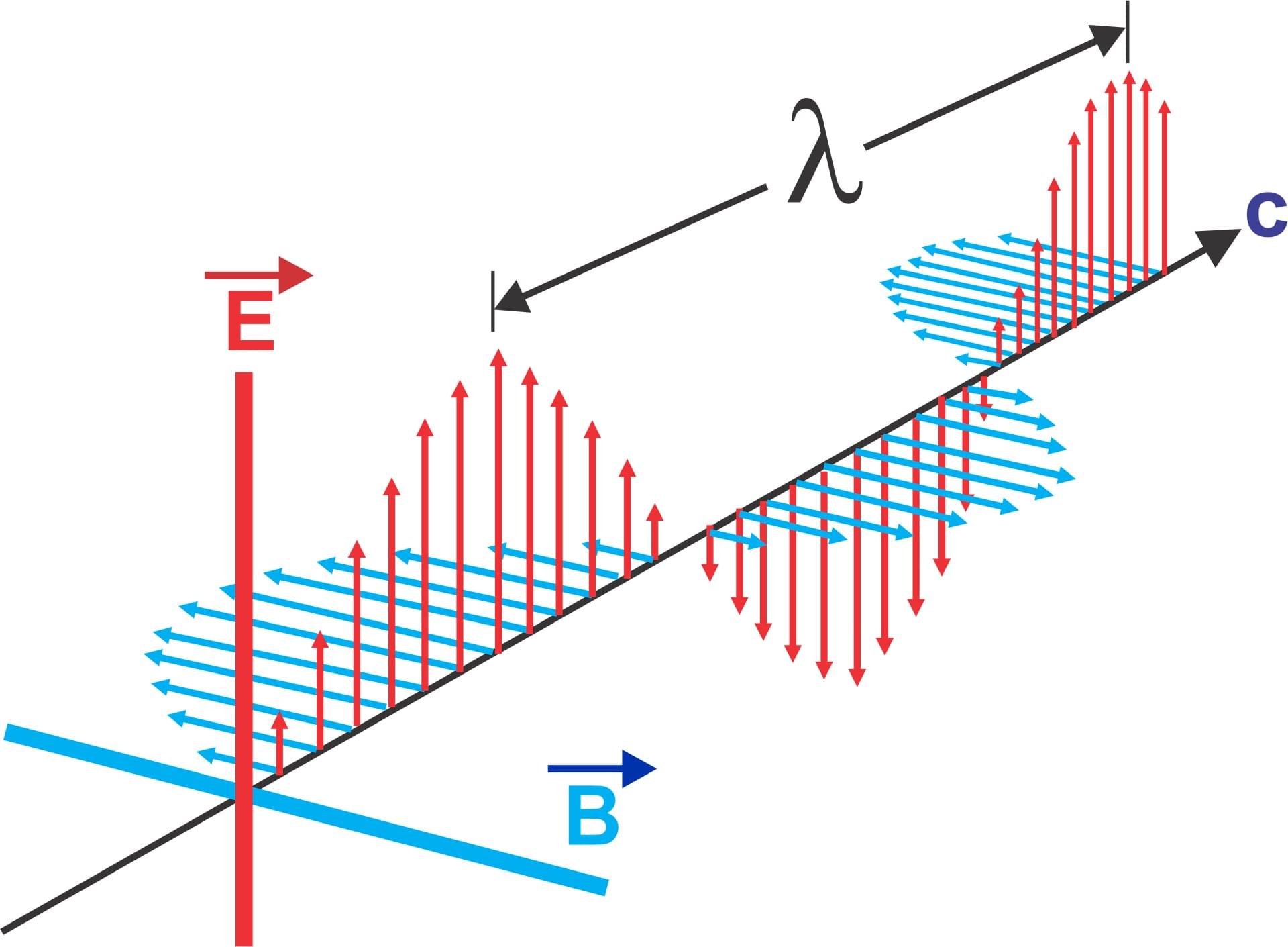
6:28 Electromagnetic force explained
7:24-Sponsor InVideo
8:35 Strong Force explained, color charges!
12:33 Weak Force explained
14:58 Why is Weak Force called a \.