Integrating robots into walls, ceilings, furniture, and appliances could radically change our indoor spaces.
Category: robotics/AI – Page 1,694
Why Scientists are Giving Robots Human Muscles
Human-robot hybrids are advancing quickly, but the applications aren’t just for complete synthetic humans. There’s a lot we can learn about ourselves in the process.
Hosted by: Hank Green.
SciShow has a spinoff podcast! It’s called SciShow Tangents. Check it out at http://www.scishowtangents.org.
———
Head to https://scishowfinds.com/ for hand selected artifacts of the universe!
———
Support SciShow by becoming a patron on Patreon: https://www.patreon.com/scishow.
———
Dooblydoo thanks go to the following Patreon supporters: Lazarus G, Sam Lutfi, D.A. Noe, سلطان الخليفي, Piya Shedden, KatieMarie Magnone, Scott Satovsky Jr, Charles Southerland, Patrick D. Ashmore, Tim Curwick, charles george, Kevin Bealer, Chris Peters.
———
Looking for SciShow elsewhere on the internet?
Facebook: http://www.facebook.com/scishow.
Twitter: http://www.twitter.com/scishow.
Tumblr: http://scishow.tumblr.com.
Instagram: http://instagram.com/thescishow.
———
Sources:
http://robotics.sciencemag.org/content/3/18/eaat4440
https://www.iis.u-tokyo.ac.jp/en/news/2916/
http://www.stroke.org/we-can-help/survivors/stroke-recovery/…emiparesis.
http://brainfoundation.org.au/images/stories/applicant_essay…_Terry.pdf.
https://www.ncbi.nlm.nih.gov/pubmedhealth/PMHT0027058/
https://training.seer.cancer.gov/anatomy/muscular/structure.html.
https://biodesign.seas.harvard.edu/soft-robotics.
https://www.nature.com/articles/nature14543
Images:
https://commons.wikimedia.org/wiki/File: Repliee_Q2_face.jpg.
NEW Nvidia AI Turns Text To 3D Video Game Objects 8X Better Than Google | Game Design AI
Deep Learning AI Specialization: https://imp.i384100.net/GET-STARTED
Nvidia unveils its new artificial intelligence 3D model maker for game design uses text or photo input to output a 3D mesh and can also edit and adjust 3D models with text descriptions. New video style transfer from Nvidia uses CLIP to convert the style of 3D models and photos. New differential equation-based neural network machine learning AI from MIT solves brain dynamics.
AI News Timestamps:
0:00 Nvidia AI Turns Text To 3D Model Better Than Google.
2:03 Nvidia 3D Object Style Transfer AI
4:56 New Machine Learning AI From MIT
#nvidia #ai #3D

Over 1,000 songs with human-mimicking AI vocals have been released by Tencent Music in China. One of them has 100m streams
MBW’s Stat Of The Week is a series in which we highlight a single data point that deserves the attention of the global music industry. Stat Of the Week is supported by Cinq Music Group, a technology-driven record label, distribution, and rights management company.  Continue to article…The use of artificial intelligence-created music just moved up a gear.
Continue to article…The use of artificial intelligence-created music just moved up a gear.

Stable Diffusion 2.0 Release
It is our pleasure to announce the open-source release of Stable Diffusion Version 2.
The original Stable Diffusion V1 led by CompVis changed the nature of open source AI models and spawned hundreds of other models and innovations all over the world. It had one of the fastest climbs to 10K Github stars of any software, rocketing through 33K stars in less than two months.
Building interactive agents in video game worlds
{kind=link}
Human behaviour is remarkably complex. Even a simple request like, “Put the ball close to the box” still requires deep understanding of situated intent and language. The meaning of a word like ‘close’ can be difficult to pin down – placing the ball inside the box might technically be the closest, but it’s likely the speaker wants the ball placed next to the box. For a person to correctly act on the request, they must be able to understand and judge the situation and surrounding context.
Most artificial intelligence (AI) researchers now believe that writing computer code which can capture the nuances of situated interactions is impossible. Alternatively, modern machine learning (ML) researchers have focused on learning about these types of interactions from data. To explore these learning-based approaches and quickly build agents that can make sense of human instructions and safely perform actions in open-ended conditions, we created a research framework within a video game environment.
Today, we’re publishing a paper and collection of videos, showing our early steps in building video game AIs that can understand fuzzy human concepts – and therefore, can begin to interact with people on their own terms.
Building NeuroTech Minimally Invasive Human Machine Interfaces | Dr. Connor Glass
Neuralink’s invasive brain implant vs phantom neuro’s minimally invasive muscle implant. Deep dive on brain computer interfaces, Phantom Neuro, and the future of repairing missing functions.
Connor glass.
Phantom is creating a human-machine interfacing system for lifelike control of technology. We are currently hiring skilled and forward-thinking electrical, mechanical, UI, AR/VR, and Ai/ML engineers. Looking to get in touch with us? Send us an email at [email protected].
Phantom Neuro.
Phantom is a neurotechnology company, spun out of the lab at The Johns Hopkins University School of Medicine, that is enabling lifelike control of robotic orthopedic technologies, such as prosthetic limbs and exoskeletons. Phantom’s solution, the Phantom X, consists of low-risk implantable sensors, AI, and enabling software. By providing superior control of robotic orthopedic mechanisms, the Phantom X will drastically improve the lives of individuals with limb difference who have yet to see a tangible improvement in quality of life despite significant advancements in the field of robotics.
Links:
[email protected].
https://www.linkedin.com/in/connor-glass-md-010124141/
https://www.linkedin.com/company/phantomneuro/
https://twitter.com/phantom_neuro.
PODCAST INFO:
The Learning With Lowell show is a series for the everyday mammal. In this show we’ll learn about leadership, science, and people building their change into the world. The goal is to dig deeply into people who most of us wouldn’t normally ever get to hear. The Host of the show – Lowell Thompson-is a lifelong autodidact, serial problem solver, and founder of startups.
LINKS
Youtube: https://www.youtube.com/channel/UCzri06unR-lMXbl6sqWP_-Q
Youtube clips: https://www.youtube.com/channel/UC-B5x371AzTGgK-_q3U_KfA
Linkedin: https://www.linkedin.com/in/lowell-thompson-2227b074
Twitter: https://twitter.com/LWThompson5
Website: https://www.learningwithlowell.com/
Podcast email: [email protected].
Timestamps.
Nano-robot antibodies that fight cancer enter first human drug trial
Scientists in Israel have created the first nano-robot antibodies designed to fight cancer. The first human trial for the new nano-robots will start soon, and it will determine just how effective the antibodies are. What is special about these particular antibodies, too, is that they are programmed to decide whether cells surrounding tumors are “bad” or “good.”
The trial is currently underway in Australia and if it goes according to plan, the nano-robot antibodies will be able to fight cells around tumors that can help the tumor while also boosting the capability of the cells inhibiting the growth of the cancerous cells. The antibodies were invented by Professor Yanay Ofran and are based on human and animal antibodies.
The goal of these nano-robot antibodies is to unlock the full potential that antibodies offer, Ofran says. Currently, the use of antibodies in medicine only utilizes a fraction of the capabilities offered by these natural disease fighters. As such, finding a way to maximize their capability has been a long-term goal for quite a while.

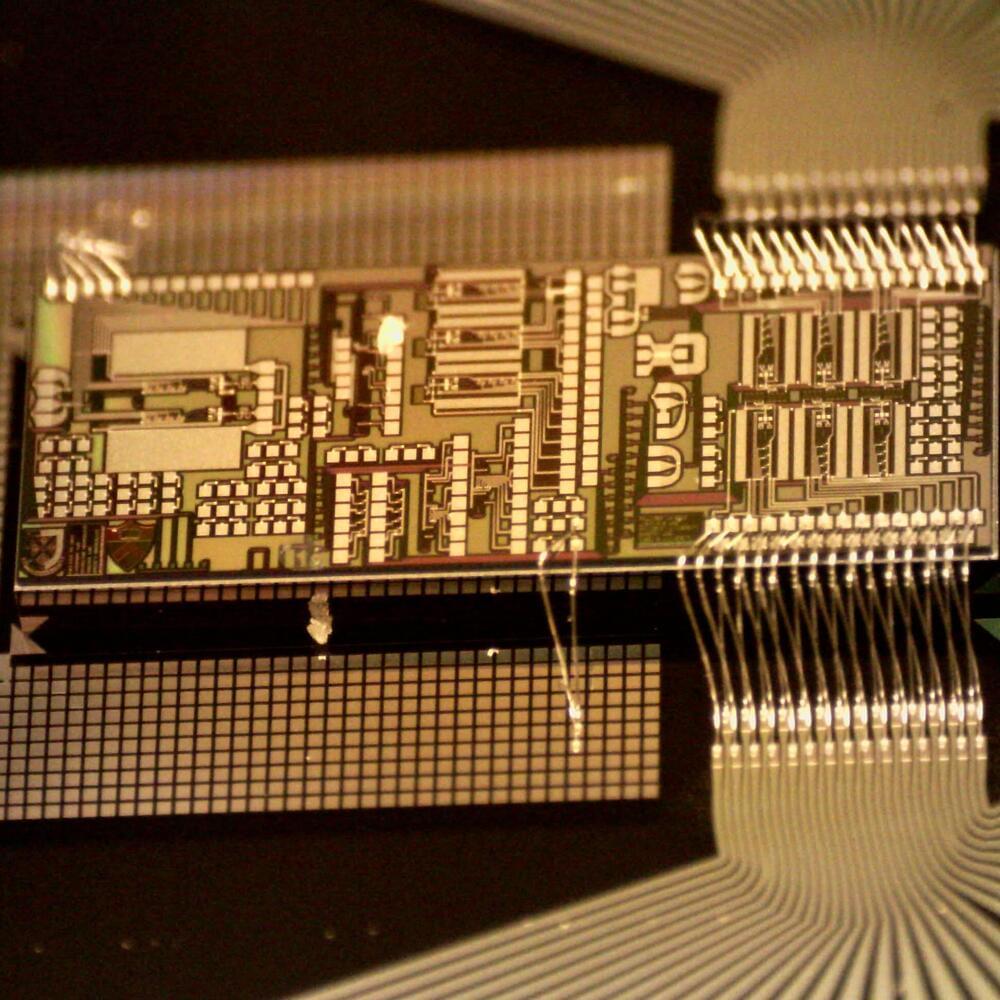
An optical chip that can train machine learning hardware
A multi-institution research team has developed an optical chip that can train machine learning hardware. Their research is published today in Optica.
Machine learning applications have skyrocketed to $165 billion annually, according to a recent report from McKinsey. But before a machine can perform intelligence tasks such as recognizing the details of an image, it must be trained. Training of modern-day artificial intelligence (AI) systems like Tesla’s autopilot costs several million dollars in electric power consumption and requires supercomputer-like infrastructure.
This surging AI “appetite” leaves an ever-widening gap between computer hardware and demand for AI. Photonic integrated circuits, or simply optical chips, have emerged as a possible solution to deliver higher computing performance, as measured by the number of operations performed per second per watt used, or TOPS/W. However, though they’ve demonstrated improved core operations in machine intelligence used for data classification, photonic chips have yet to improve the actual front-end learning and machine training process.