{kind=link}
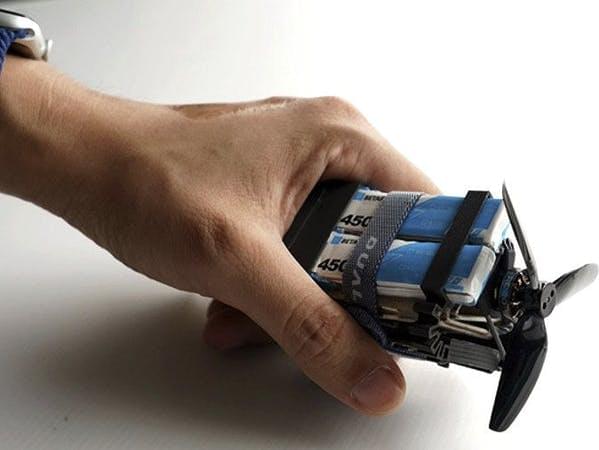
Driven by a SparkFun ESP32 MicroMod Processor, this laser-cut drone wraps up tight for ease of storage and transportation.
Category: drones – Page 70

4 Israeli inventions feature in TIME magazine’s 100 Best Inventions for 2021
OrCam’s reading device, ElectReon’s ‘smart road’ tech, a sensor for farming and security drones all make the list.
1. OrCam Read, a smart reading support device developed by OrCam Technologies, the maker of artificial intelligence-based wearable devices to help the blind and visually impaired read texts via audio feedback. The company launched OrCam Read in 2,020 a handheld digital reader meant to help people with language processing challenges, including dyslexia. The device (priced at $1,990) captures and reads out full pages of text and digital screens, and follows voice commands.
NASA And SpaceX’s Delayed ‘Halloween’ Mission Is Finally Going Skywards. Here’s When And Where To Watch Four Astronauts Blast-Off
After a series of delays for bad weather, the ill-health of an astronaut and then a wait for the splashdown of the previous mission this morning the world’s only re-usable orbital rocket take four astronauts to the International Space Station (ISS) as SpaceX and NASA launch the Crew-3 mission.
Originally due to launch on October 27 2021 from NASA’s Kennedy Space Center in Florida, NASA has now confirmed that its SpaceX Crew-3 mission will take-off no earlier than 9:03 p.m. EST on Wednesday, November 10 2021.
After the night launch the Falcon 9 rocket will attempt to land on a drone-ship in the Atlantic.
It will be SpaceX’s fourth NASA flight with astronauts, though last month it also successfully launched and landed the first all-civilian private astronaut crewed mission to orbit Earth.
Full Story:
DARPA Successfully Recovered a Gremlins Drone Mid-Air For the First Time
A milestone achievement for the army.
After multiple attempts, the Defense Advanced Research Projects Agency — commonly known as DARPA — has confirmed that it has successfully completed a mid-air recovery of the X-61 drone, Gremlins. While details of the test were not revealed, DARPA said that the mission was accomplished last month at the Dugway Proving Ground in Utah.
The Gremlins drone is a semi-autonomous unmanned aerial vehicle (UAV) designed to carry a wide variety of payloads, including those for electronic warfare while being operated remotely. Launched from a mothership, such as the modified Hercules C-130 cargo aircraft, these drones are built to operate in swarms, offering the military a low-cost way of engaging its adversaries, without getting close to enemy lines. Therefore, the mid-air recovery of these drones is vital for them to enter service.


Bigger Drones, Better AI: U.S. Air Force Installs Its Skyborg Robot Brain In A Pair Of Stealth Drones
The Air Force’s Skyborg team flew two General Atomics MQ-20 Avenger stealth drones on the “multi-hour” Oct. 26 flight over California. One of the Ave… See more.
Two stealth drones soared over Edwards Air Force Base in California last week, offering some encouraging evidence that the U.S. Air Force’s new drone “brain” not only works—it works with a bunch of different drone types.
The Air Force hopes to install the Skyborg autonomy core system in a wide array of unmanned aerial vehicles. The idea is for the ACS to steer armed drones with minimal human control—even in the heat of battle. That way the drones can fly as robotic wingmen for manned fighters without demanding too much of the busy human pilots.
The Newest Robots and Future Technologies: All the OctoberTechnology News in One Issuet
✅ Instagram: https://www.instagram.com/pro_robots.
You are on PRO Robots Channel and in this digest roundup you will see: immortality technology, artificial muscles for robots, a robot chef printing food on a 3D printer, a home robot from Amazon and what it did not please the experts, Honda’s plans to create robots, rockets and flying cars, the unusual drone Prometheus, NASA’s mission to Jupiter, Samsung neuromorphic chip, unusual robots. Exhibition of the latest robotic weapons in the U.S., Boston Dynamics is preparing to release new robots every 3–5 years, unusual experiments with four-legged robots and more. Watch the video to the end and write in the comments, which news interested you more than others?
0:00 Immortality technology from Jeff Bezos | Technology News.
9:50 New home robot from Amazon | Robot spider from Apex Legends | Technology News.
18:50 Samsung neuromorphic chip copies memory | Drone superpowers | Technology news.
28:32 The latest military robots at U.S. 2021.
#prorobots #robots #robot #future technologies #robotics.
More interesting and useful content:
✅ Elon Musk Innovation https://www.youtube.com/playlist?list=PLcyYMmVvkTuQ-8LO6CwGWbSCpWI2jJqCQ
✅Future Technologies Reviews https://www.youtube.com/playlist?list=PLcyYMmVvkTuTgL98RdT8-z-9a2CGeoBQF
✅ Technology news.
#prorobots #technology #roboticsnews.
How Google’s Wing Drone Delivery Aircraft Works
{kind=link}
Will drone deliveries be a practical part of our future? We visit the test facilities of Wing to check out how their engineers and aircraft designers have developed a drone and drone fleet control system that is actually in operation today in parts of the world. Here’s how their VTOL drone works and what it’s like to both load and receive a package carried by an autonomous aircraft!
Shot by Joey Fameli and edited by Norman Chan.
Additional footage courtesy of Wing.
Music by Jinglepunks.
Join this channel to support Tested and get access to perks:
https://www.youtube.com/channel/UCiDJtJKMICpb9B1qf7qjEOA/join.
Tested Ts, stickers, mugs and more: https://tested-store.com.
Subscribe for more videos (and click the bell for notifications): https://www.youtube.com/subscription_center?add_user=testedcom.
Twitter: http://www.twitter.com/testedcom.
Facebook: http://www.facebook.com/testedcom.
Instagram: https://www.instagram.com/testedcom/
Discord: https://www.discord.gg/tested.
Amazon Storefront: http://www.amazon.com/shop/adamsavagestested?tag=lifeboatfound-20.
Savage Industries T-shirts: https://cottonbureau.com/stores/savage-merchandising#/shop.
Tested is:
Watch these autonomous drones zip through the woods
Drones trained using “privileged expert” achieve amazing abilities.