Researchers supported by France’s Defense Ministry are working to develop a more effective surveillance drone that’s also less prone to detection by its imitation of birds or insects.
In this case, that involved learning how winged creatures of nature might allow data-collecting UAVs to do their work without being seen, or be identified if they are.
Drone manufacturer and automated flight specialist Skydio says it has won a contract to supply its X2D UAVs to the US Army’s Short-Range Reconnaissance Program (SRR). Valued at $20.2 million annually, the fixed-price provisionment agreement is expected to be worth $99.8 million over its five-year duration.
The fact that the final decision looked closely at feedback from soldiers themselves on overall product performance and quality, meanwhile, is an indicator that the company’s UAVs impressed people from the boots on the ground all the way up to the top brass. The pitch for the contract involved 30 small-scale drone manufacturers, from which Skydio’s craft was judged the most ready to fulfill the US Army’s SRR operational requirements from day one.
The U.S. Army has awarded a $20 million a year contract to a California-based drone manufacturer, named Skydio, as part of its efforts to move away from foreign-made and commercially available off-the-shelf drones. Skydio revealed in a press release that it would supply its X2D drones for the U.S. Army’s Short Range Reconnaissance (SSR) Program.
With an aim to equip its soldiers with rapidly deployable aerial solutions that can conduct reconnaissance and surveillance activities over short ranges, the Army’s SSR program has been considering small drones for some time now. More than 30 vendors submitted their proposals to the Army, and five finalists were shortlisted for rigorous testing.
The Drive accessed a federal contract from 2017 that listed the minimal specifications of the SSR program which include a flight time of 30 minutes, a range of 1.86 nautical miles (3 km), and the ability to tolerate winds up to 15 knots. With the singular purpose of reconnaissance, the drone does not need to have swappable payloads but it should support mapping missions and the ability to geotag imagery. U.S. Army has awarded a $20 million a year contract to a California-based drone manufacturer, named Skydio, as part of its efforts to move away from foreign-made and commercially available off-the-shelf drones. Skydio revealed in a press release that it would supply its X2D drones for the U.S. Army’s Short Range Reconnaissance (SSR) Program.
Silicon Valley hydrogen fuel cell innovator Hypoint has inaugurated a new UK unit intended to speed development of its air-cooled aviation power technology, and ready it to supply zero-carbon power to next-generation aircraft like electric takeoff and landing vehicles (eVTOL) as they prepare to launch services.
HyPoint’s tech uses compressed air for both cooling and oxygen supplies delivered to its fuel systems, which are lighter, less polluting, have longer lifespans, and enable seven times more flight capacity than lithium-ion and other chemical batteries. Those attributes are luring developers of existing, new drone, and eVTOL craft to give emerging hydrogen cell products serious consideration as drivers of their vehicles – especially as the world seeks to reduce its carbon output. In 2018, aviation sector’s share of global CO2 emissions was 2.5%.
The algorithms spot and classify synthetic-material objects based on the distinctive manner in which they reflect polarized light. Polarized light reflected from human-made objects often differs from natural objects, such as vegetation, soil, and rocks.
The researchers tested such a camera, both on the ground and from a US Coast Guard helicopter, which was flying at the altitude at which the polarimetric-camera-equipped drones will fly.
Once fully operational, data collected by the drone-based machine learning system will be used to make maps that show where marine debris is concentrated along the coast to guide rapid response and removal efforts. The researchers will provide NOAA Marine Debris Program staff with training in the use of the new system, along with standard operating procedures manual.
You are on the PRO Robots channel and today we have selected for you the strangest and most amazing robots. Giant robots, robot transformers, flying humanoids, exoskeletons that give superpowers, robot skiers, a new robot for space and much more. Watch the TOP of the newest, strangest and most unusual robots in the world! Watch the video till the end and write in the comments, which robot surprised you more than others?
0:00 In this video. 0:22 RH5 Manus. 1:17 NINA from Doosan Robotics. 1:53 GENTLE MONSTER 2:24 LEO robot. 3:21 CRAM Robot. 3:55 ATOUN 4:23 Guardian GT 4:56 Flying humanoids. 5:22 Jet-HR2 5:35 NABi. 6:01 ALFRED The Four Legged Robot. 6:20 Aquanaut. 7:06 ANYmal robot. 7:50 Max robot. 8:30 The Mountain Skiing Robot. 9:03 A doughnut drone from Cleo Robotics. 9:19 A folding drone. 10:26 Drone bug. 10:42 SqUID warehouse robot.
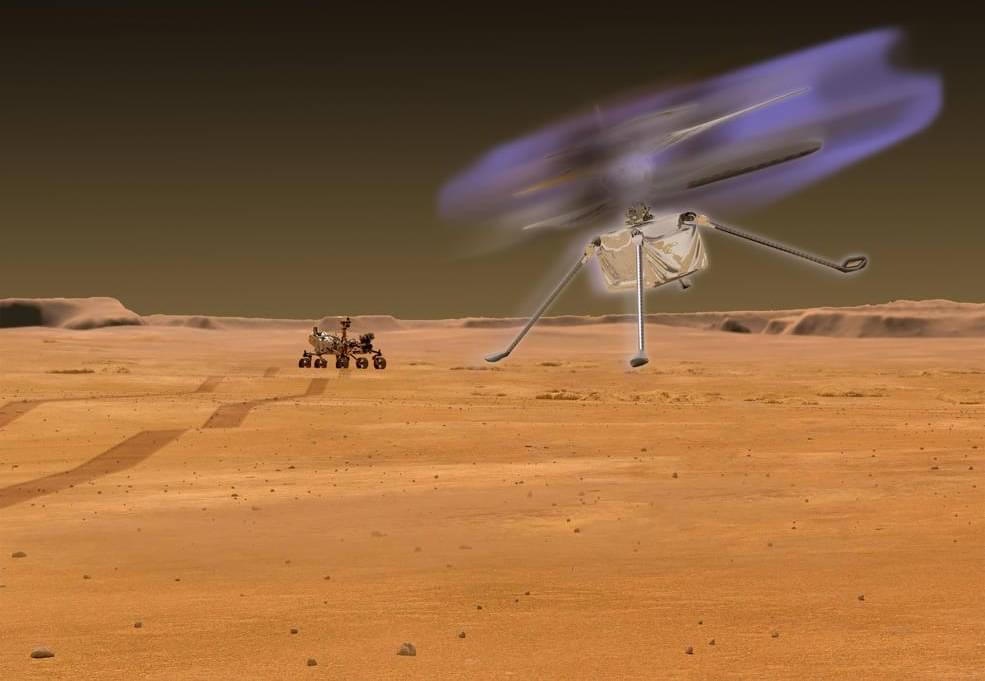
If the Ingenuity helicopter would fly at night on Mars, its very possible the whirring rotors would create enough static electricity in the extremely dry Martian atmosphere to cause the air around the craft to glow.
“The faint glow would be most visible during evening hours when the background sky is darker,” said William Farrell, from Goddard Space Flight Center and lead author of a paper on this topic. “NASA’s experimental Ingenuity helicopter does not fly during this time, but future drones could be cleared for evening flight and look for this glow.”
If you’ve ever shuffled your feet across a wool carpet on a dry winter day, and then reached out to touch a metal doorknob, you’re familiar with the static discharge that creates a little zap — a spark — that leaps between your fingers and the metal knob.
Researchers at the University of Bristol in the U.K. have designed a flying robot that flaps its wings and can generate more power than a similar-sized insect, which it was inspired from. The robot could pave way for smaller, lighter, and more effective drones, the researchers claimed in an institutional press release.
When it comes to flying robots, researchers have relied largely on propeller-based designs. Even though it is well known that bio-inspired flapping wings are a much more efficient method of flying, replicating them in a flying object has been challenging. As the researchers stated in the press release, the use of motors, gears, and complex transmission systems to achieve the flapping movement adds to the complexity as well as the weight of the entire system, which has many undesired effects. drones are great but not very efficient. Researchers in Bristol may have cracked what it takes to make flapping-wing flying robots.