Scientists have created thin, elastic bottlebrush polymer films that can function as artificial muscles at significantly lower voltages than currently available materials, potentially enabling their use in safer medical devices and artificial organs.
Whether wriggling your toes or lifting groceries, muscles in your body smoothly expand and contract. Some polymers can do the same thing — acting like artificial muscles — but only when stimulated by dangerously high voltages. Now, researchers in ACS Applied Materials & Interfaces report a series of thin, elastic films that respond to substantially lower electrical charges. The materials represent a step toward artificial muscles that could someday operate safely in medical devices.
Artificial muscles could become key components of movable soft robotic implants and functional artificial organs. Electroactive elastomers, such as bottlebrush polymers, are attractive materials for this purpose because they start soft but stiffen when stretched. And they can change shape when electrically charged. However, currently available bottlebrush polymer films only move at voltages over 4,000 V, which exceeds the 50 V maximum that the U.S. Occupational Safety & Health Administration states is safe. Reducing the thickness of these films to less than 100 µm could lower the required voltages, but this hasn’t been done successfully yet for bottlebrush polymers. So, Dorina Opris and colleagues wanted to find a simple way to produce thinner films.
Humongous Fungus, a specimen of Armillaria ostoyae, has claimed the title of world’s largest single organism. Though it features honey mushrooms above ground, the bulk of this creature’s mass arises from its vast subterranean mycelial network of filamentous tendrils. It has spread across more than 2,000 acres of soil and weighs over 30,000 metric tons. Yet I would contend that Humongous Fungus represents a mere microcosm of the world’s true largest organism, a creature that I will call Cyborg Earth. What is Cyborg Earth? Eastern religions have suggested that all life is fundamentally interconnected. Cyborg Earth represents an extension of this concept.
All across the globe, biological life thrives. Quintillions upon quintillions of biomolecular computations happen every second, powering all life. Mycoplasma bacteria. Communities of leafcutter ants. The Humongous Fungus. Beloved beagles. Seasonal influenza viruses. Parasitic roundworms. Families of Canadian elk. Vast blooms of cyanobacteria. Humanity. Life works because of complexity that arises from simplicity that in turn arises from whatever inscrutable quantum mechanical rules lay beneath the molecular scale.
All creatures rearrange atoms in various ways. Termites and beavers rearrange larger bunches of atoms than most organisms. As humans progressed from paleolithic to metalwork to industrialization and then to the space age, information revolution, and era of artificial intelligence, they learned to converse with the atoms around them in an ever more complex fashion. We are actors in an operatic performance, we are subroutines of evolution, we are interwoven matryoshka patterns, an epic chemistry.
IN THE NEAR FUTURE, we should anticipate certain technological developments that will forever change our world. For instance, today’s text-based ChatGPT will evolve to give rise to personal “conversational AI” assistants installed in smart glasses and contact lenses that will gradually phase out smartphones. Technological advances in fields such as AI, AR/VR, bionics, and cybernetics, will eventually lead to “generative AI”-powered immersive neurotechnology that enables you to create virtual environments and holographic messages directly from your thoughts, with your imagination serving as the “prompt engineer.” What will happen when everyone constantly broadcasts their mind?
Can the pursuit of experience lead to true enlightenment? Are we edging towards Experiential Nirvana on a civilizational level despite certain turbulent events?
In just a few years, technology will merge with our bodies in unimaginable ways and push the boundaries of what it is to be human. While medical technology still aims at remediating disabilities, cyborgs strive to something else: a merging of man and machine with the goal of enhancing human capabilities.
The first cyborgs are already crossing the boundaries of their human limits just for the sake of it – at home, in basement workshops and tattoo parlours, using low-tech equipment and a do-it-yourself attitude. They are a tiny minority, seen by many as weird or crazy experimenters, but in the near future we may call them pioneers.
In this film, we meet some of these explorers. We also look at research in medical technology to assess how close science is to creating cyborgs, and ponder the social and ethical dilemmas of a cyborg society.
SUBSCRIBE for more amazing stories, including free FULL documentaries. At Java Films we have an incredible library of award-winning documentaries: from world-leading investigations to true crime and history, we have something for everyone!
Click the SUBSCRIBE button and make sure to set NOTIFICATIONS to stay updated with all new content!
A Shanghai-based startup called Hypershellis trying its luck with an AI-powered exoskeleton that promises to take a big load off the next time you’re on a hike or run — and they say it’s even small enough to fit inside a backpack.
But the jury is still out on whether it’s anything more than a sci-fi-looking fashion accessory. To anyone thinking of backing, all the usual caveats about crowdfunding apply — it might not work at all, nevermind well, and it’s not uncommon to receive nothing at all.
Farahany argues that the development and use of neurotech presents a challenge to our current understanding of human rights. Devices designed to measure, record, and influence our mental processes—used by us or on us—may infringe on our rights to mental privacy, freedom of thought, and mental self-determination. She calls this collection of freedoms the right to cognitive liberty. IEEE Spectrum spoke with Farahany recently about the future and present of neurotech and how to weigh its promises—enhanced capabilities, for instance, including bionics and prosthetics and even a third arm —against its potential to interfere with people’s mental sovereignty.
When people suffer spinal cord injuries and lose mobility in their limbs, it’s a neural signal processing problem. The brain can still send clear electrical impulses and the limbs can still receive them, but the signal gets lost in the damaged spinal cord.
The Center for Sensorimotor Neural Engineering (CSNE)—a collaboration of San Diego State University with the University of Washington (UW) and the Massachusetts Institute of Technology (MIT)—is working on an implantable brain chip that can record neural electrical signals and transmit them to receivers in the limb, bypassing the damage and restoring movement. Recently, these researchers described in a study published in the journal Nature Scientific Reports a critical improvement to the technology that could make it more durable, last longer in the body and transmit clearer, stronger signals.
The technology, known as a brain-computer interface, records and transmits signals through electrodes, which are tiny pieces of material that read signals from brain chemicals known as neurotransmitters. By recording brain signals at the moment a person intends to make some movement, the interface learns the relevant electrical signal pattern and can transmit that pattern to the limb’s nerves, or even to a prosthetic limb, restoring mobility and motor function.
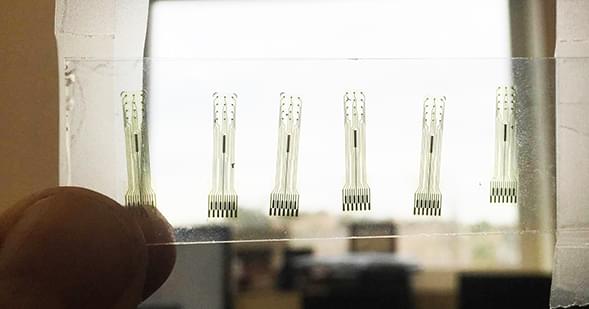
A team from Korea created more flexible neural electrodes that minimize tissue damage and still transmit clear brain signals.
Electrodes placed in the brain record neural activity, and can help treat neural diseases like Parkinson’s and epilepsy. Interest is also growing in developing better brain-machine interfaces, in which electrodes can help control prosthetic limbs. Progress in these fields is hindered by limitations in electrodes, which are relatively stiff and can damage soft brain tissue.
Designing smaller, gentler electrodes that still pick up brain signals is a challenge because brain signals are so weak. Typically, the smaller the electrode, the harder it is to detect a signal. However, a team from the Daegu Gyeongbuk Institute of Science & Technology in Korea developed new probes that are small, flexible and read brain signals clearly.




{kind=link}