We’ll never be able to extract any information about what’s inside a black hole’s event horizon. Here’s why a singularity is inevitable.

This little robot fish is 40 centimeters long and is made of a soft, rubber-like material.
It’s propelled by a dual-function fluid that is pulsated through the body of the fish through a simple circulatory mechanism – similar to blood (and otherwise described as “robot blood”).
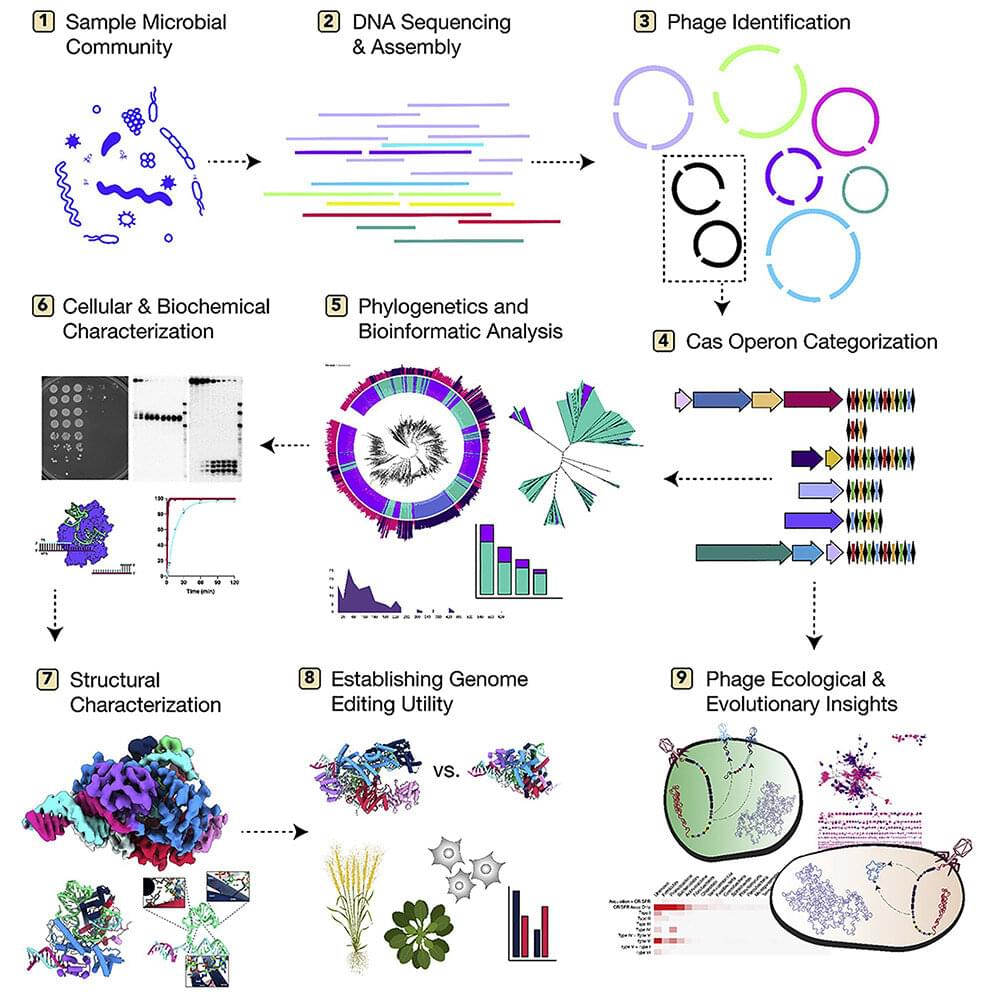
A team of researchers at the University of California, Berkeley, and University of California, Los Angeles, working with a colleague from Vilnius University, has found evidence of thousands of phages with DNA strands that should allow them to conduct gene editing on other viruses or bacteria. Their paper has been published in the open-access journal Cell.
In 2012, some of the researchers on this same team discovered that CRISPR-Cas9 could be programmed using RNA to edit targeted DNA strands from other organisms (and won a Nobel prize for it). Their work emerged from findings that many types of bacteria use CRISPR-Cas systems to defend against viral attacks. Using such systems, bacteria can cut and remove strands of DNA from viruses and store them in their own genomes to combat the same viral strain should it attack again.
Since that time, researchers have found that some viruses have similar machinery, but it was deemed to be rare. In this new effort, the researchers sought to determine actual prevalence.
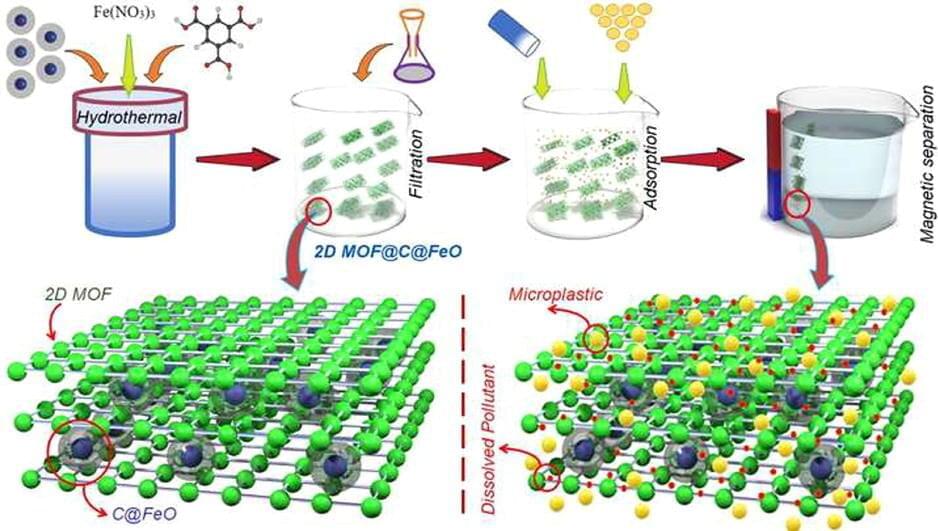
Researchers at RMIT University have found an innovative way to rapidly remove hazardous microplastics from water using magnets.
Lead researcher Professor Nicky Eshtiaghi said existing methods could take days to remove microplastics from water, while their cheap and sustainable invention achieves better results in just one hour.
The team says they have developed adsorbents, in the form of a powder, that remove microplastics 1,000 times smaller than those currently detectable by existing wastewater treatment plants.

Caption :
MIT researchers have developed a technique that greatly reduces the error in an optical neural network, which uses light to process data instead of electrical signals. With their technique, the larger an optical neural network becomes, the lower the error in its computations. This could enable them to scale these devices up so they would be large enough for commercial uses.
Images for download on the MIT News office website are made available to non-commercial entities, press and the general public under a Creative Commons Attribution Non-Commercial No Derivatives license. You may not alter the images provided, other than to crop them to size. A credit line must be used when reproducing images; if one is not provided below, credit the images to “MIT.”

Scientists have created, synthesized, and analyzed a new class of fluorophores, which are luminous chemical compounds. These are the new bullet systems based on cyanopyrazine. According to research, the inclusion of cyanogroup compounds in fluorophores considerably boosts the efficiency of organic light-emitting diodes (OLED). This indicates they can be utilized to develop new materials to improve the brightness of smartphone, computer, and television screens. The researchers’ findings were recently published in the journal Dyes and Pigments.
The research was led by Egor Verbitskiy, the director of the Postovsky Institute of Organic Synthesis Ural Branch of RAS and a member of the Laboratory of Medical Chemistry and Advanced Organic Materials at the Ural Federal University. He states that physicists were aware that introducing cyanogroups to fluorophores can enhance the OLEDs’ properties and overall efficiency.
Let’s not just cure cancer: let’s cure aging One of the most exciting areas of modern scientific research is the investigation of the causes and cures for aging. Not individual diseases like cancer and heart disease, but the processes which make us elderly and frail, and which thereby make us more susceptible to these diseases.

The first three warships are being rapidly modified to accept the weapon with the first ready for operation in a little over 12 months the U.K. Ministry of Defence said in a statement.
Defence Secretary Ben Wallace revealed the deal during a visit of the British aircraft carrier HMS Queen Elizabeth to Norway this week.
The surface-to-surface strike weapon is being rushed into service in time to meet next year’s pensioning off of the Harpoon missile originally built by McDonnell Douglas before the company was acquired by Boeing.