The ability to extract trace bits of DNA from soil, water, and even air is revolutionizing science. But it’s not foolproof.


Big Tech is also throwing its weight behind a promising technical standard that could add a “nutrition label” to images, video, and audio. Called C2PA, it’s an open-source internet protocol that relies on cryptography to encode details about the origins of a piece of content, or what technologists refer to as “provenance” information. The developers of C2PA often compare the protocol to a nutrition label, but one that says where content came from and who—or what—created it. Read more about it here.
On February 8, Google announced it is joining other tech giants such as Microsoft and Adobe in the steering committee of C2PA and will include its watermark SynthID in all AI-generated images in its new Gemini tools. Meta says it is also participating in C2PA. Having an industry-wide standard makes it easier for companies to detect AI-generated content, no matter which system it was created with.
OpenAI too announced new content provenance measures last week. It says it will add watermarks to the metadata of images generated with ChatGPT and DALL-E 3, its image-making AI. OpenAI says it will now include a visible label in images to signal they have been created with AI.

Adobe and TikTok announced today that TikTok’s AI-powered Creative Assistant is now available directly within Adobe Express. The two companies say the integration will help businesses and creators make and market content more effectively. Creative Assistant is available now in English as an add-on in Adobe Express for both free and Premium users.
The Creative Assistant add-on in Adobe Express aims to reduce the time and effort required when working across different platforms when creating content. With Adobe Express, creators have access to templates, Adobe Stock video clips, audio, stickers and an Adobe Express TikTok video creator. With the new Creative Assistant add-on, creators will get access to TikTok insights about trending hashtags and AI-powered tools all within Adobe Express. The Assistant can also brainstorm creative ideas or even write out video scripts.
The integration also allows businesses and creators to schedule and publish content directly to TikTok, without having to leave Adobe Express.
You’ll soon be able to tell ChatGPT to forget things — or remember specific things in future conversations.
Here’s a ChatGPT guide to help understand Open AI’s viral text-generating system. We outline the most recent updates and answer your FAQs.
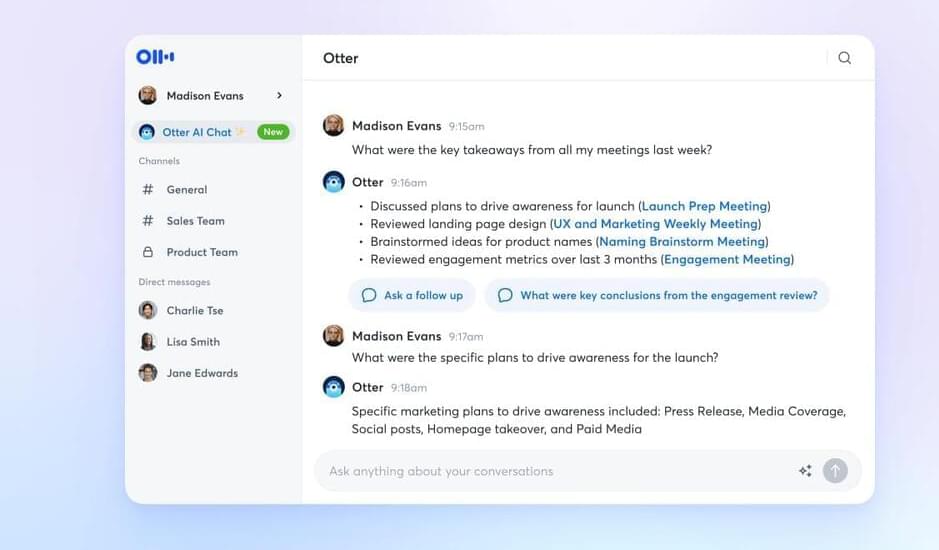
Otter, the AI-powered meeting assistant that transcribes audio in real time, is adding another layer of AI to its product with today’s introduction of Meeting GenAI, a new set of AI tools for meetings. Included with GenAI is an AI chatbot you can query to get information about past meetings you’ve recorded with Otter, an AI chat feature that can be used by teams and an AI conversation summary that provides an overview of the meeting that took place, so you don’t have to read the full transcript to catch up.
Although journalists and students may use AI to record things like interviews or lectures, Otter’s new AI features are aimed more at those who leverage the meeting helper in a corporate environment. The company envisions the new tools as a complement or replacement for the AI features offered by different services like Microsoft Copilot, Zoom AI Companion and Google Duet, for example.
Explains Otter CEO Sam Liang, the idea to introduce the new AI tools was inspired by his own busy schedule.

Nvidia, ever keen to incentivize purchases of its latest GPUs, is releasing a tool that lets owners of GeForce RTX 30 Series and 40 Series cards run an AI-powered chatbot offline on a Windows PC.
Nvidia has released a new tool, Chat with RTX, that allows users to run a GenAI model offline — and fine-tune it on their data.

This month, Google unveiled its latest attempt to dethrone ChatGPT from the position it’s held since it launched as king of the generative AI chatbots.
Bard – now renamed Gemini–was released in early 2023 following OpenAI’s groundbreaking LLM-powered chat interface.
Dive into the ultimate AI showdown between ChatGPT and Google’s Gemini to discover which platform claims the crown for superior intelligence, versatility and innovation.

