Merdeces-Benz.
Mercedes-Benz Trucks unveiled the concept prototype of the eActros LongHaul at the 2022 IAA Transportation trade fair in Hanover, Germany.

The company targets a price of $3 per passenger per mile.
The first self-flying, all-electric, four-passenger eVTOL air taxi in the world was unveiled by the California-based Advanced Air Mobility (AAM) company Wisk Aero. Generation 6 is Wisk’s go-to-market aircraft and the first autonomous eVTOL to be a candidate for type approval by the Federal Aviation Administration (FAA).
The most sophisticated air taxi in the world, Generation 6 combines one of the safest passenger transport systems in commercial aviation with industry-leading autonomous technology and software, human oversight of every trip, and a generally streamlined design.

“Take Materials Science 101. You won’t regret it.”
Newly 3D printed metal could be used by Tesla to produce all-electric vehicles with just a few massive parts, thanks to two MIT students. Announced very recently.
PhonlamaiPhoto/iStock.
Announced very recently, the new sort of steel was created by MIT undergraduates and their graduate student mentor in Germany, not for the construction of the cars but for the die-casting molds that stamp them out in just a few distinct pieces.
Will Filippo Ganna be able to break the record with this bike?
Globally known Italian bicycle manufacturer Pinarello has unveiled a new 3D printed bicycle, “Bolide F HR 3D.” Produced as the fastest one in its field, Italian track and road cyclist Filippo Ganna is preparing to use the bike for his upcoming attempt at the UCI Hour Record.
Pinarello says this enabled it “to introduce new shapes and features that are impossible to replicate” using existing carbon fiber construction techniques.
The Bolide F HR 3D was created expressly for Ganna’s attempt at the UCI Hour Record, which tests cyclists’ endurance by measuring how far they can go on a velodrome track in one hour, as New Scientist reported.
Pinarello.

Tesla is finally planning to expand the Gigafactory Nevada building after years of being “stuck” at about “30% of its final size.”
Tesla Gigafactory Nevada was the first major step in Tesla’s effort to secure battery cell supply for its ambitious growth.
The automaker partnered with Panasonic to deploy new battery cell production capacity at the facility, and Tesla used those cells to build battery packs for its vehicles and energy storage products.
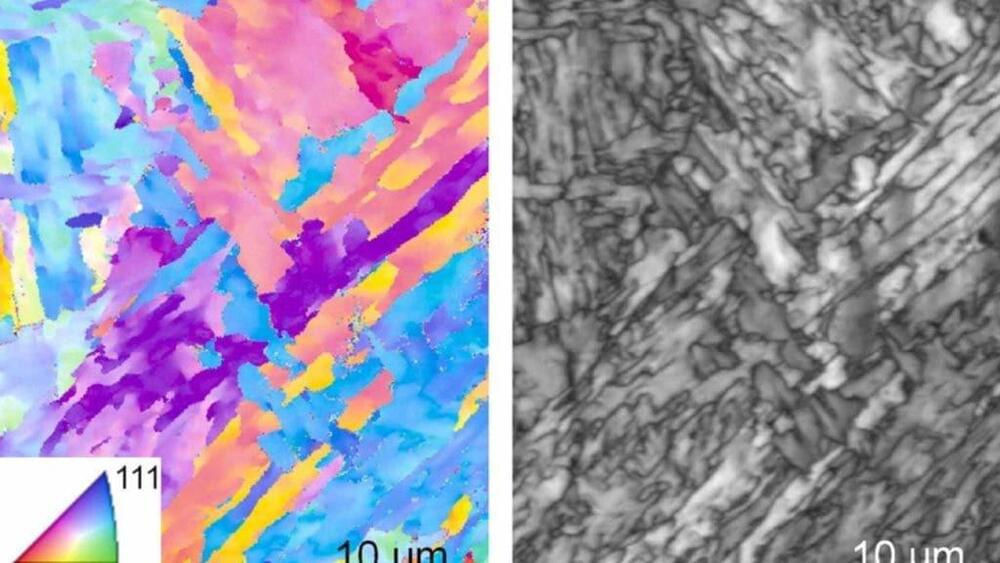
For airliners, cargo ships, nuclear power plants and other critical technologies, strength and durability are essential. This is why many contain a remarkably strong and corrosion-resistant alloy called 17–4 precipitation hardening (PH) stainless steel. Now, for the first time ever, 17–4 PH steel can be consistently 3D-printed while retaining its favorable characteristics.
A team of researchers.

Tesla has unveiled its latest version of its Dojo supercomputer and it’s apparently so powerful that it tripped the power grid in Palo Alto.
Dojo is Tesla’s own custom supercomputer platform built from the ground up for AI machine learning and more specifically for video training using the video data coming from its fleet of vehicles.
The automaker already has a large NVIDIA GPU-based supercomputer that is one of the most powerful in the world, but the new Dojo custom-built computer is using chips and an entire infrastructure designed by Tesla.
There was in-depth engineering rundowns as Musk asks AI experts to join Tesla and help build a better society.
Tesla AI Day 2022 explored the processes required to mimic the human, driver and worker. The autonomous robot and car were laid out in detail, from an engineering point of view. Elon Musk, the CEO of Tesla, opened the event, and laid out this event’s main focus, including the public in the Tesla projects, especially Optimus Tesla Bot.
The Optimus project begun in April 2022, with a concept of a fully autonomous humanoid robot, that is mass-produced and inexpensive enough that it is accessible to the average person.
Musk introduced the project lead engineer and her assistants.
Tesla.

The vessel is claimed to fly above the water thanks to its electric propulsion technology.
Targeting the worldwide high-speed ferry industry, a maritime design and technologies company has presented the plan for its new 100 percent electric EF-24 passenger vehicle.
“Our high-speed passenger ferry provides a cost-effective public transport solution that helps address air pollution, congestion, and noise,” said Dr. Iain Percy OBE, Artemis Technologies founder, and CEO.
Artemis Technologies.
EF-24 is one of many zero-emission ships being created by Artemis Technologies in Belfast, Northern Ireland, according to a press release published by the company on Sunday.