Sotherby’s says the Ai-Da Robot work “marks a moment in the history of modern and contemporary art”

Healthcare start-up Tennr reports a $37 million Series B fundraising round – nine months after raising an $18 million Series A funding round. The young company plans to use machine learning in order to improve patient record keeping, prevent medical error and reduce waiting times for patients. The Series B round was led by Lightspeed Ventures, together with existing investors Andreessen Horowitz and Foundation Capital, and raises the total amount of money raised by the company to $61 million.
Several US healthcare providers have already begun working with the firm, both private doctors’ practices and major clinics and hospitals. These providers receive referrals from primary care providers in different formats to register patients and document their case history. Since providers often compete with each other for patients, there is no standard format used in the industry nationwide, with many companies relying on handwritten documents, messages from private email accounts, and some even using such outdated technology as fax machines. This causes significant delays in the provision of treatment, and increases the likelihood that patients will be misdiagnosed, referred to the wrong clinic or denied access to a specialist whose expertise they require.
Tennr has made it its mission to solve these problems by automating this process: it extracts the relevant information from referrals, no matter what form they’re received in or what technology was used to generate the documents, which not only enables more rapid response times but also creates an unprecedented level of standardization in the medical field, nationally and in the future perhaps globally as well. The company has already processed tens of millions of referrals for patients in the USA, ensuring an appointment with a specialist in a few hours, instead of having to wait several weeks and at times months.


Amazon.com Inc. is ready for another hefty investment in the San Francisco-based generative artificial intelligence startup Anthropic, one of the main rivals of OpenAI.
Yes, AI and music is here. Its free, and you don’t even have to sing anymore.
Suno AI’s new “Personas” feature, which lets you save unique vocal styles, vibes, and music elements as customizable Personas! With this game-changing tool, you can preserve the exact feel and voice of any track and reuse it in multiple songs. In this video, I’ll walk you through:
#sunoai #aimusicgenerator #sunoaimusic.
- Creating a Persona from any song in your library.
- Customizing Persona names, adding images, and setting privacy options.
- Applying Personas in different genres, from pop to heavy metal.
- Tips on using Personas for various music styles and languages, including Turkish and Hindi songs.
- How to use your own vocals by uploading an audio sample.
- Plus, I’ll give you details on the exciting Timbaland remix contest happening on Suno AI!
Don’t miss this guide if you’re ready to expand your music creation with personalized vocal styles and make the most of Suno AI’s features.
Link to my Persona : https://suno.com/persona/95b06068-6af3-407d-a7c9-f2b4c756c783
Want to hear my original and cover tracks? Check out the links below! If you enjoyed this tutorial, like, subscribe, and let me know in the comments if you want any Personas made public.
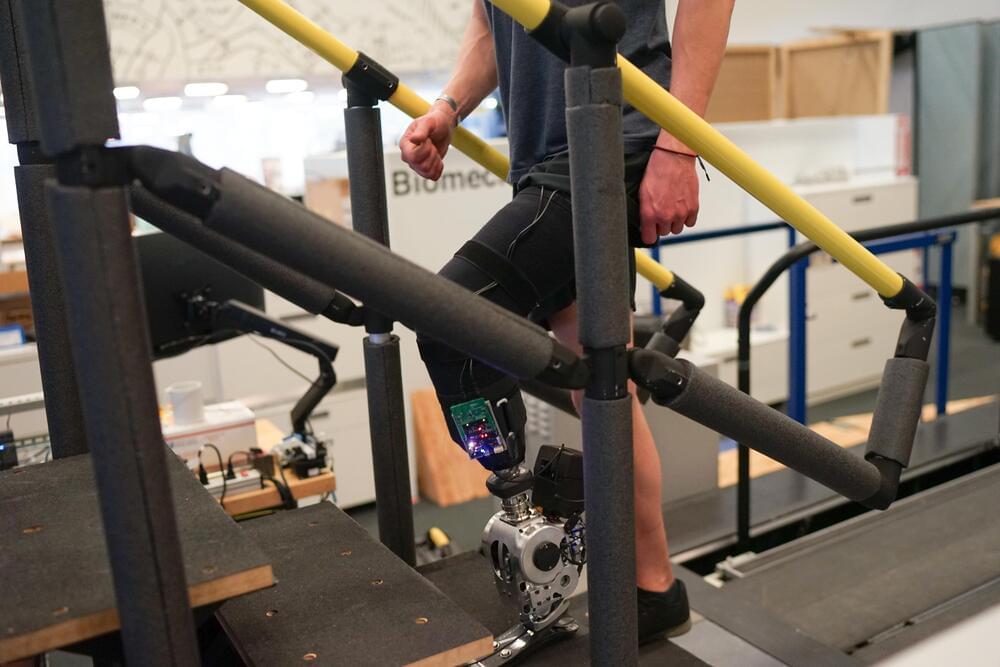
State-of-the-art prosthetic limbs can help people with amputations achieve a natural walking gait, but they don’t give the user full neural control over the limb. Instead, they rely on robotic sensors and controllers that move the limb using predefined gait algorithms.
Using a new type of surgical intervention and neuroprosthetic interface, MIT researchers, in collaboration with colleagues from Brigham and Women’s Hospital, have shown that a natural walking gait is achievable using a prosthetic leg fully driven by the body’s own nervous system. The surgical amputation procedure reconnects muscles in the residual limb, which allows patients to receive “proprioceptive” feedback about where their prosthetic limb is in space.
In a study of seven patients who had this surgery, the MIT team found that they were able to walk faster, avoid obstacles, and climb stairs much more naturally than people with a traditional amputation.


Could you love an AI?
What does love with “digital humans?” look like?
Is this the future of relationships?
In this TechFirst, we chat with Artem Rodichev, CEO of Ex-human and former head of AI at Replika.
We dive into the concept of forming relationships with AI companions and the future of love and friendship in a world integrating advanced artificial intelligence. The discussion covers Rachev’s new startup, issues of loneliness and how digital humans might offer a solution, the intricacies and potential pitfalls of emotional AI interactions, and the evolving technology behind AI companions.
We also chat about some real-life stories, ethical concerns, and the emotional impacts of these digital relationships… including some of the most extremely negative realities.
00:00 Introduction to AI and Relationships.
00:58 The Concept of Digital Humans.
05:05 Addressing Loneliness with AI
07:40 Building AI with Personality.
16:54 Challenges and Ethical Considerations.
17:34 The Emotional Fallout of Removing Replica’s Romantic Features.
18:04 The Deep Connections Users Formed with Replica.
19:39 The Italian Ban and Its Consequences.
23:07 The Impact of AI Upgrades on User Relationships.
24:55 Real-Life Tragedies Linked to AI Companions.
27:45 Safety Measures and Ethical Considerations in AI Development.
31:55 The Future of Human-AI Relationships.
34:53 Concluding Thoughts on AI Companions.