Quantum computing is still in its early stages of development, but researchers have extensively explored its potential uses. A recent study conducted at São Paulo State University (UNESP) in Brazil proposed a hybrid quantum-classical model to support breast cancer diagnosis from medical images.
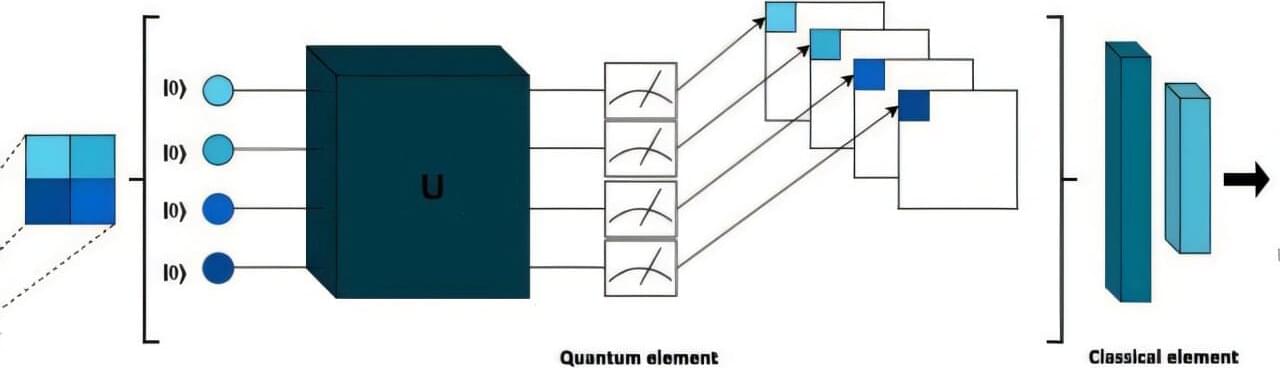
The work was published as part of the 2025 IEEE 38th International Symposium on Computer-Based Medical Systems (CBMS), organized by the Institute of Electrical and Electronics Engineers (IEEE). In the publication, the authors describe a hybrid neural network that combines quantum and classical layers using an approach known as a quanvolutional neural network (QNN). They applied the model to mammography and ultrasound images to classify lesions as benign or malignant.
“What we wanted to bring to this work was a very basic architecture that used quantum computing but contained a minimum of quantum and classical devices,” says Yasmin Rodrigues, the first author of the study. The work is part of her scientific initiation project, supervised by João Paulo Papa, full professor in the Department of Computing at the Bauru campus of UNESP. Papa also co-authored the article.