⚠️ Copyright Disclaimers. • Section 107 of the U.S. Copyright Act states: “Notwithstanding the provisions of sections 106 and 106A, the fair use of a copyrighted work, including such use by reproduction in copies or phonorecords or by any other means specified by that section, for purposes such as criticism, comment, news reporting, teaching (including multiple copies for classroom use), scholarship, or research, is not an infringement of copyright.” • We use images and content in accordance with the YouTube Fair Use copyright guidelines.
When genes are activated and expressed, they show patterns in cells that are similar in type and function across tissues and organs. Discovering these patterns improves our understanding of cells—which has implications for unveiling disease mechanisms.
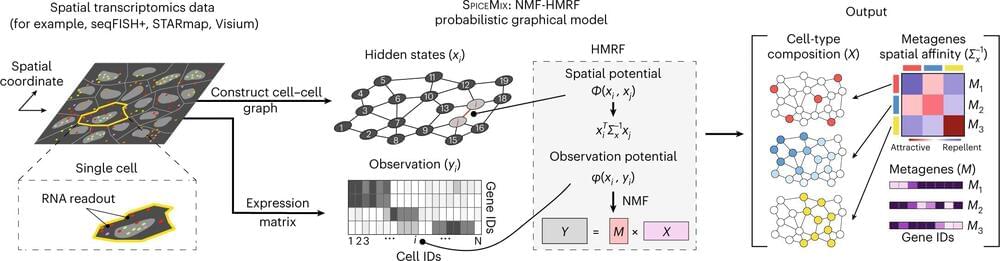
The advent of spatial transcriptomics technologies has allowed researchers to observe gene expression in their spatial context across entire tissue samples. But new computational methods are needed to make sense of this data and help identify and understand these gene expression patterns.
A research team led by Jian Ma, the Ray and Stephanie Lane Professor of Computational Biology in Carnegie Mellon University’s School of Computer Science, has developed a machine learning tool to fill this gap. Their paper on the method, called SPICEMIX, appeared as the cover story in the most recent issue of Nature Genetics.
Designers including Philippe Starck and Titi Ogufere share their predictions for 2023’s major design trends, from the continued rise of AI to how inflation could impact the industry.
To mark the start of 2023, Dezeen asked 10 designers and industry experts to share the materials, technologies and influences that they think are set to dominate design trends this year.
I made this video with the help of Artificial Intelligence to prove the point Terence McKenna makes in this video that AI will surpass the human production in all the levels.
What did AI tools make? - Tuning the audio quality to make it look like a podcast record, even though the audio was recorded with a low quality hand microphone in a party in 1998. - Creating a realistic HD picture of Terence McKenna and tuning the color level, with background.
AUTHOR : Terence Kemp McKenna (November 16, 1946 – April 3, 2000) was an American ethnobotanist and mystic who advocated the responsible use of naturally occurring psychedelic plants. He spoke and wrote about a variety of subjects, including psychedelic drugs, plant-based entheogens, shamanism, metaphysics, alchemy, language, philosophy, culture, technology, environmentalism, and the theoretical origins of human consciousness. He was called the “Timothy Leary of the ‘90s”, “one of the leading authorities on the ontological foundations of shamanism”, and the “intellectual voice of rave culture”.
McKenna formulated a concept about the nature of time based on fractal patterns he claimed to have discovered in the I Ching, which he called novelty theory, proposing that this predicted the end of time, and a transition of consciousness in the year 2012. His promotion of novelty theory and its connection to the Maya calendar is credited as one of the factors leading to the widespread beliefs about the 2012 phenomenon. Novelty theory is considered pseudoscience.
Sam Altman was a force to be reckoned with as the president of Y Combinator. Little has changed in his transition to CEO of OpenAI, a “capped-profit” company whose mission it is to “enact a path to safe artificial general intelligence.” We talked at length about his work, OpenAI’s mission, and some of the criticisms that the young outfit is facing. We had fun, talking with him for this extended sit-down; hope you’ll enjoy it, too.
OpenAI is the developer of a new AI program called ChatGPT, capable of writing and conversing very much like a human.
On the first task, the general impression from teachers was that at best it provided a framework but not the details for lesson planning. The same was said about the letter-writing capabilities of the tool, and the composing of a rubric. On providing feedback on student work, the response was less than impressed with the comments and grading. And on writing a letter of recommendation, the comments stated that what ChatGPT came up with was “far too generic.” So all in all, the current version of ChatGPT as a teaching aid seems underwhelming.
On the student work side, ChatGPT is far more problematic. Because ChatGPT can compose the kind of content it produced for me in the above example, teachers have expressed concern that the tool makes it easy for students to submit work they didn’t write.
When OpenAI made it publicly available in November of last year, the New York City School Board blocked access to it on its networks and computers. A Princeton University student created an app called GPTZero aimed at the responsible use of AI in education and capable of detecting ChatGPT-written documents.
Every year, the Stanford Institute for Human-Centered Artificial Intelligence (HAI) puts out its AI Index, a massive compendium of data and graphs that tries to sum up the current state of artificial intelligence. The 2022 AI Index, which came out this week, is as impressive as ever, with 190 pages covering R&D, technical performance, ethics, policy, education, and the economy. I’ve done you a favor by reading every page of the report and plucking out 12 charts that capture the state of play.
It’s worth noting that many of the trends I reported from last year’s 2021 index still hold. For example, we are still living in a golden AI summer with ever-increasing publications, the AI job market is still global, and there’s still a disconcerting gap between corporate recognition of AI risks and attempts to mitigate said risks. Rather than repeat those points here, we refer you to last year’s coverage.
The tech giant, Google, has clarified its position on AI-generated content, stating that content created solely for search engine rankings violates their guidelines; however, it is not an issue if created with people in mind.