Chinese researchers are developing an airborne quantum communications network with drones as nodes.

I’m super excited to share this new Quartz article of mine, part of an ongoing personal debate about #transhumanism, #kids, and #education in my family:
But the age of downloading experience and expertise directly into our brain mainframe is coming. So is downloading professional training, including everything from becoming a police officer to practicing medicine or investigative journalism.
For many in the audience, I think that was the first time considering this could become a reality in our lifetime.
But in plenty of instances, brainwave tech is already here. People fly drones using mind-reading headsets. Parkinson’s disease patients can use brain chips to calm shaking attacks. Machine interfaces let people silently communicate mind-to-mind with one another, or with devices.
Brainwave technology works by recording the brain’s thought patterns—configurations of neurons that fire in distinct ways for different thoughts—and replicating those patterns back into the brain via electrical stimulation from a nonbiological device.
The AirSelfie 2 and JJRC H59 Ferry are two selfie drones with a lot in common. If you are thinking about getting a selfie drone then READ THIS FIRST.

Biology student Mattia Menchetti performed an experiment on a colony of European paper wasps which yielded some very colorful results. Paper wasps are known for their water-resistant nests constructed out of fibers of dead wood and plant stems which have been chewed into a pulp and mixed with saliva. Menchetti provided a captive colony of these wasps with colored paper and in a beautiful display of entomological artwork, the insects produced a vibrant, rainbow nest.
Menchetti began by giving the wasps bits of yellow paper, and slowly introduced more and more multicolored sheets. The colony happily made use of the material to construct a sturdy, technicolor home to house their larvae. Paper wasps are some of the most common wasp species, typically seen in backyards around North America. They tend to establish a single nest across multiple seasons and generations; for this reason, their homes must be incredibly durable. A protein found in the saliva of these wasps is actually so effective at waterproofing their nests that it has been used by scientists to construct a biodegradable drone.
Menchetti has performed a variety of scientific studies about insects, mammals, and the ecology of alien species, which he explains in further detail on his website.

One simple pro mod for better aerial images
Multirotors and sports cameras are very nearly synonymous at this point in time. The popularity of one has undoubtedly boosted the popularity of the other. I bought my first DJI Phantom in part because I already owned a GoPro and wanted to see if I could make it fly. For others, it may be that they already owned a quadcopter and wanted to see if they could lift a camera with it. Yet this mutually beneficial symbiosis hasn’t led to any significant changes in the way sports cameras are made, notably the lens. But with a simple modification, you can make that camera even more sky-worthy.
Fishes don’t fly.

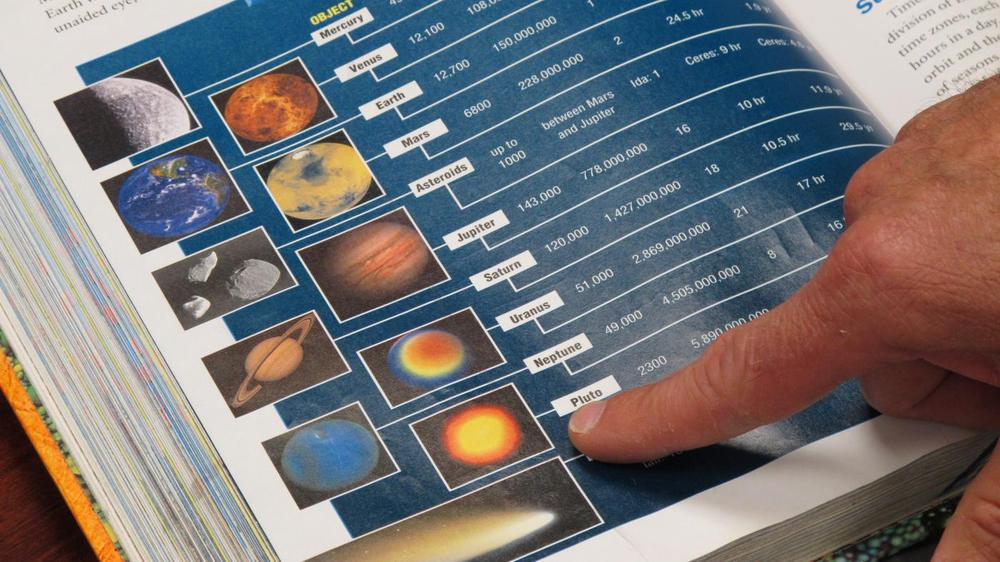
NASA is going to Titan.
The space agency announced today (June 27) that the next mission in its New Frontiers line of medium-cost missions will be Dragonfly, a rotorcraft designed to ply the skies of the huge, hazy and potentially life-hosting Saturn moon.
If all goes according to plan, Dragonfly will launch in 2026 and land on Titan eight years later, NASA officials said. The probe will then spend at least 2.5 years cruising around the 3,200-mile-wide (5,150 kilometers) moon, making two dozen flights that cover a total of about 110 miles (180 km).
Researchers in China are using drones as nodes in the development of an airborne quantum communications network. The article describes how such a network, using a quantum drone would be nigh unhackable.


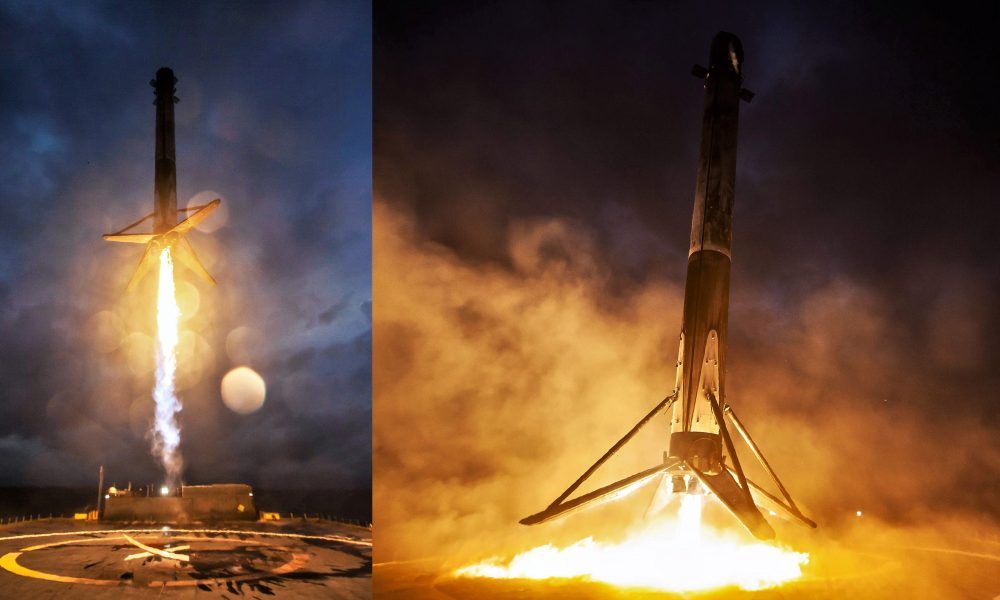
In an unexpected last-second change, SpaceX has moved Falcon Heavy Flight 3’s center core landing on drone ship Of Course I Still Love You (OCISLY) from 40 km to more than 1240 km (770 mi) off the coast of Florida.
Drone ship OCISLY is already being towed to the landing site, necessary due to the sheer distance that needs to be covered at a leisurely towing pace. The current record for distance traveled during booster recovery was set at ~970 km by Falcon Heavy center core B1055 in April 2019. If successful, Falcon Heavy center core B1057 will smash that record by almost 30% after sending two dozen spacecraft on their way to orbit. Falcon Heavy Flight 3 is scheduled to lift off in support of the Department of Defense’s Space Test Program 2 (STP-2) mission no earlier than 11:30 pm ET (03:30 UTC), June 24th. A routine static fire test at Pad 39A will (hopefully) set the stage for launch on Wednesday, June 19th.