Adults with chronic heart failure with reduced ejection fraction (HFrEF) who wore a lightweight exosuit during exercise showed significant improvements in the 6-minute walk distance and daily step counts, which were not statistically significant in those who received nonassisted conventional exercise training.
Robot-assisted training with a lightweight exosuit may help patients with advanced heart failure walk more and help them stay engaged in rehabilitation, a study finds.
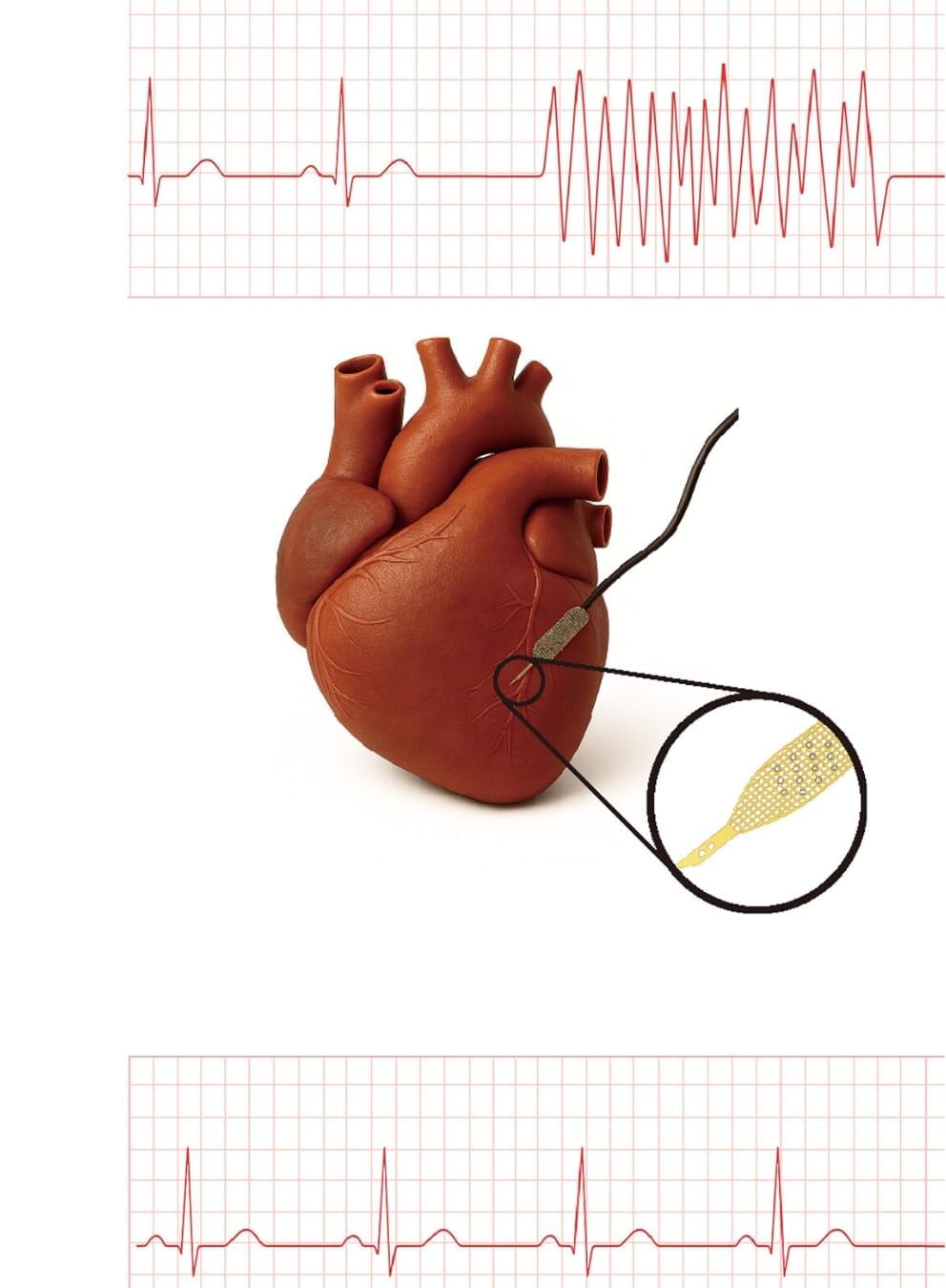
Heart muscle cells grown from patient stem cells—known as human induced pluripotent stem cell–derived cardiomyocytes, or hiPSC-CMs—are a promising way to repair hearts damaged by heart attacks and heart failure. But transplanted hiPSC-CMs often have trouble syncing to the rhythm of native heart cells, which can cause dangerous arrhythmias after transplantation.
For years, stem cell biologists and cardiac researchers have been looking for ways to improve how implanted hiPSC-CMs mature and integrate into the heart. The challenge is that once the hiPSC-CMs are implanted in vivo, it’s hard to monitor how they integrate.
Now, Harvard University researchers have developed the first platform capable of continuously monitoring how transplanted cells mature, communicate, and synchronize with native tissue inside the body. Using this system, the researchers identified a self-assembling peptide that accelerated the maturation of hiPSC-CMs and improved the electrical coupling of the transplanted cardiac organoids. The research is published in Science.
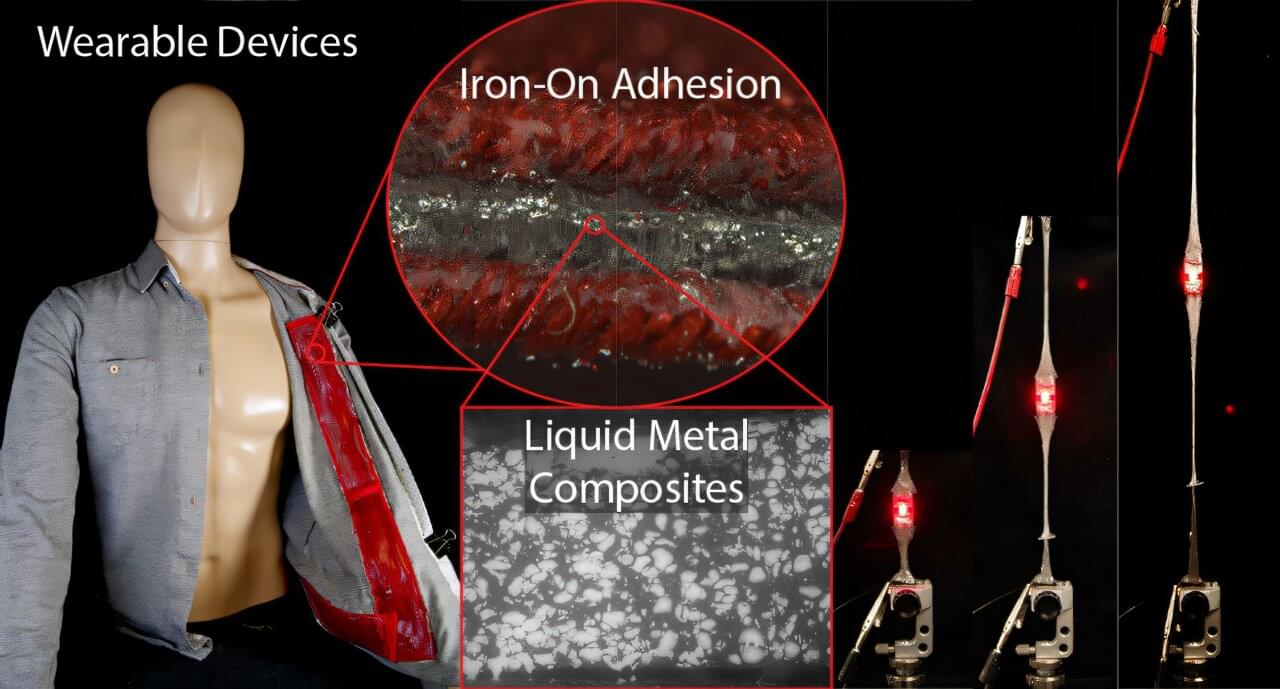
Iron-on patches can repair clothing or add personal flair to backpacks and hats. And now they could power wearable tech, too. Researchers reporting in ACS Applied Materials & Interfaces have combined liquid metal and a heat-activated adhesive to create an electrically conductive patch that bonds to fabric when heated with a hot iron. In demonstrations, circuits ironed onto a square of fabric lit up LEDs and attached an iron-on microphone to a button-up shirt.
“E-textiles and wearable electronics can enable diverse applications from health care and environmental monitoring to robotics and human-machine interfaces. Our work advances this exciting area by creating iron-on soft electronics that can be rapidly and robustly integrated into a wide range of fabrics,” says Michael D. Bartlett, a researcher at Virginia Tech and corresponding author on the study.
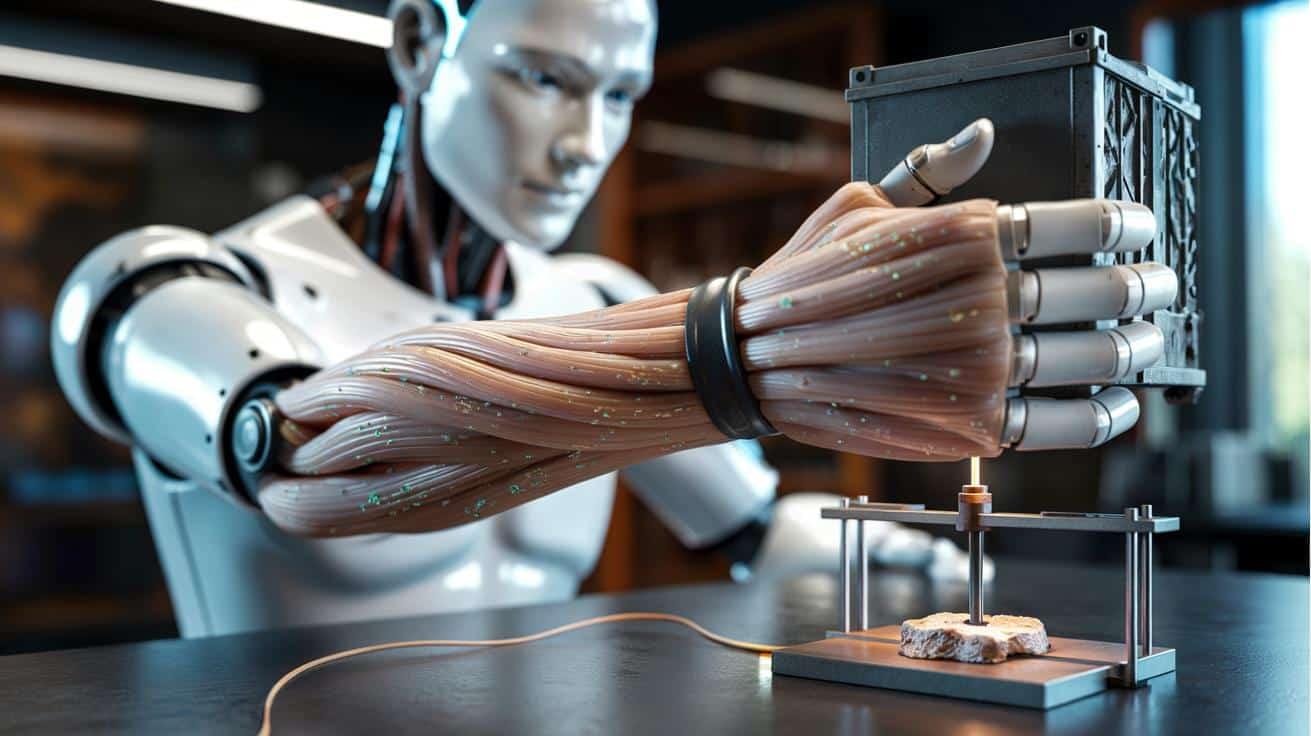
EPFL scientists have integrated discarded crustacean shells into robotic devices, leveraging the strength and flexibility of natural materials for robotic applications.
Although many roboticists today turn to nature to inspire their designs, even bioinspired robots are usually fabricated from non-biological materials like metal, plastic and composites. But a new experimental robotic manipulator from the Computational Robot Design and Fabrication Lab (CREATE Lab) in EPFL’s School of Engineering turns this trend on its head: its main feature is a pair of langoustine abdomen exoskeletons.
Although it may look unusual, CREATE Lab head Josie Hughes explains that combining biological elements with synthetic components holds significant potential not only to enhance robotics, but also to support sustainable technology systems.
From cyborgs to hive minds and civilizations of pure thought, we trace the possible futures of our species through the next trillion tomorrows.
Checkout Scav: https://go.nebula.tv/scav?ref=isaacar… Watch my exclusive video Autonomous Space Industry: https://nebula.tv/videos/isaacarthur–… Nebula using my link for 40% off an annual subscription: https://go.nebula.tv/isaacarthur Grab one of our new SFIA mugs and make your morning coffee a little more futuristic — available now on our Fourthwall store! https://isaac-arthur-shop.fourthwall… Visit our Website: http://www.isaacarthur.net Join Nebula: https://go.nebula.tv/isaacarthur Support us on Patreon: / isaacarthur Support us on Subscribestar: https://www.subscribestar.com/isaac-a… Facebook Group: / 1,583,992,725,237,264 Reddit: / isaacarthur Twitter: / isaac_a_arthur on Twitter and RT our future content. SFIA Discord Server: / discord Credits: The First Interstellar Colony Humanity’s Leap Beyond Sol Written, Produced & Narrated by: Isaac Arthur Editor: Keith Oxenrider Select imagery/video supplied by Getty Images Music by Epidemic Sound: http://nebula.tv/epidemic & Stellardrone Chapters 0:00 Intro 0:15 The Road Ahead 2:24 What Do We Mean by “Human,” “Transhuman,” and “Posthuman”? 7:22 Life Extension – The Oldest Dream 10:33 Intelligence Beyond Biology – AI and Human Integration 14:19 Enhancing the Body and Mind 17:00 Civilizations of the Augmented 19:31 Scavenger Hunt 20:51 Strange Posthuman Pathways 23:11 Outward Migration – Stars and Timelines 25:00 Risks, Fears, and Pushback 26:27 Humanity on Cosmic Timescales 27:43 The Expanding Story. Watch my exclusive video Autonomous Space Industry: https://nebula.tv/videos/isaacarthur–… Get Nebula using my link for 40% off an annual subscription: https://go.nebula.tv/isaacarthur.
Grab one of our new SFIA mugs and make your morning coffee a little more futuristic — available now on our Fourthwall store! https://isaac-arthur-shop.fourthwall…
Visit our Website: http://www.isaacarthur.net. Join Nebula: https://go.nebula.tv/isaacarthur. Support us on Patreon: / isaacarthur. Support us on Subscribestar: https://www.subscribestar.com/isaac-a… Facebook Group: / 1583992725237264 Reddit: / isaacarthur. Twitter: / isaac_a_arthur on Twitter and RT our future content. SFIA Discord Server: / discord. Credits: The First Interstellar Colony Humanity’s Leap Beyond Sol. Written, Produced & Narrated by: Isaac Arthur. Editor: Keith Oxenrider. Select imagery/video supplied by Getty Images. Music by Epidemic Sound: http://nebula.tv/epidemic & Stellardrone.
Chapters. 0:00 Intro. 0:15 The Road Ahead. 2:24 What Do We Mean by “Human,” “Transhuman,” and “Posthuman”? 7:22 Life Extension – The Oldest Dream. 10:33 Intelligence Beyond Biology – AI and Human Integration. 14:19 Enhancing the Body and Mind. 17:00 Civilizations of the Augmented. 19:31 Scavenger Hunt. 20:51 Strange Posthuman Pathways. 23:11 Outward Migration – Stars and Timelines. 25:00 Risks, Fears, and Pushback. 26:27 Humanity on Cosmic Timescales. 27:43 The Expanding Story
Researchers in South Korea say they have built a soft, magnetic artificial muscle that hits hard numbers without turning into a stiff piston. The material flexes, contracts and relaxes like flesh, yet ramps up stiffness on demand when asked to do real work. That mix has long sat out of reach for humanoid robots that need both agility and strength.
Most humanoids move with a cocktail of motors, gears and pneumatic lines. These systems deliver power, but they also add bulk and make contact risky. Soft actuators change the equation. They integrate into limbs, cushion impacts and tolerate misalignment. They also weigh far less than hydraulic stacks and slot neatly inside compact forms like hands, faces and torsos.
Not exactly a brain chip per se by a bit of nanotech.
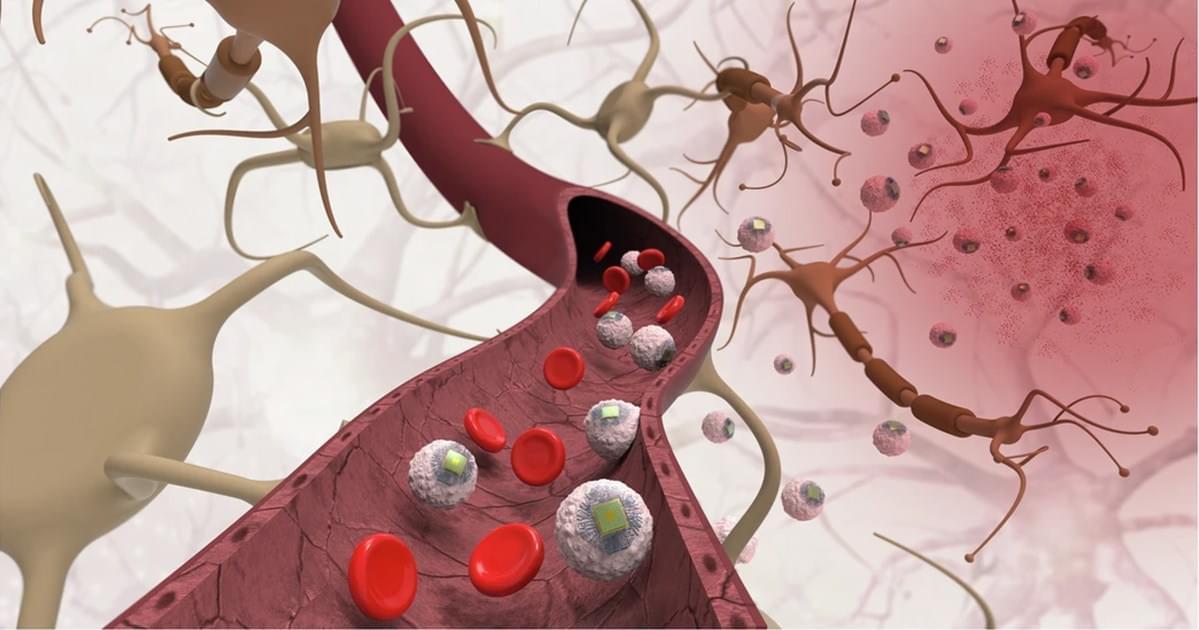
While companies like Elon Musk’s Neuralink are hard at work on brain-computer interfaces that require surgery to cut open the skull and insert a complex array of wires into a person’s head, a team of researchers at MIT have been researching a wireless electronic brain implant that they say could provide a non-invasive alternative that makes the technology far easier to access.
They describe the system, called Circulatronics, as more of a treatment platform than a one-off brain chip. Working with researchers from Wellesley College and Harvard University, the MIT team recently released a paper on the new technology, which they describe as an autonomous bioelectronic implant.
As New Atlas points out, the Circulatronics platform starts with an injectable swarm of sub-cellular sized wireless electronic devices, or “SWEDs,” which can travel into inflamed regions of the patient’s brain after being injected into the bloodstream. They do so by fusing with living immune cells, called monocytes, forming a sort of cellular cyborg.
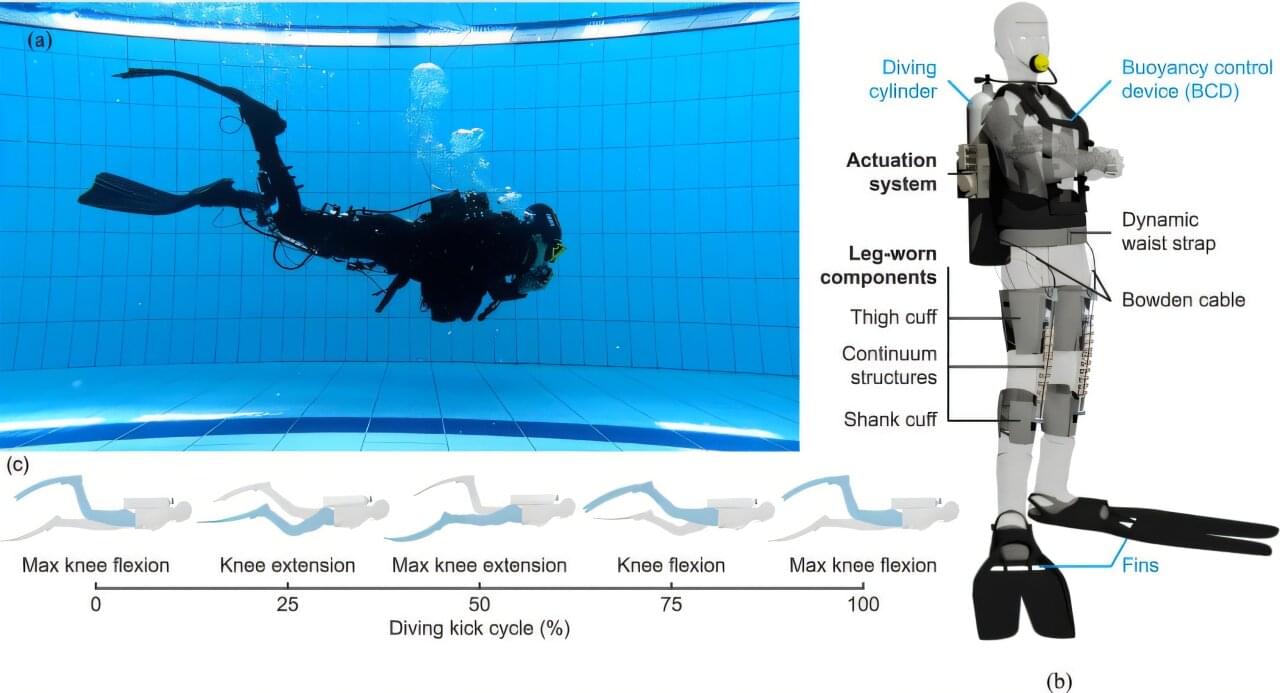
A research team led by Professor Wang Qining from the School of Advanced Manufacturing and Robotics, Peking University, has developed the world’s first portable underwater exoskeleton system that assists divers’ knee movement, significantly reducing air consumption and muscle effort during dives.
The findings, published in IEEE Transactions on Robotics on October 14, 2025, open new possibilities for enhancing human performance in underwater environments.
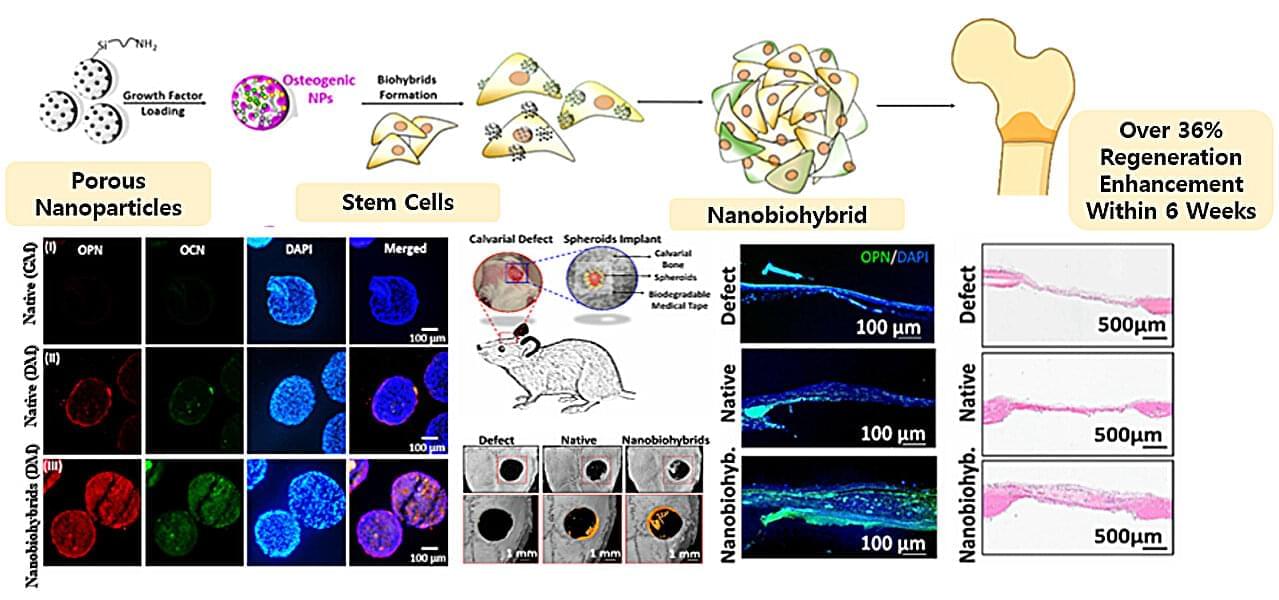
A research team in South Korea has successfully developed a novel technology that combines nanoparticles with stem cells to significantly improve 3D bone tissue regeneration. This advancement marks a step forward in the treatment of bone fractures and injuries, as well as in next-generation regenerative medicine.
The research is published in the journal ACS Biomaterials Science & Engineering.
Dr. Ki Young Kim and her team at the Korea Research Institute of Chemical Technology (KRICT), in collaboration with Professor Laura Ha at Sunmoon University, have engineered a nanoparticle-stem cell hybrid, termed a nanobiohybrid by integrating mesoporous silica nanoparticles (mSiO₂ NPs) with human adipose-derived mesenchymal stem cells (hADMSCs). The resulting hybrid cells demonstrated markedly enhanced osteogenic (bone-forming) capability.