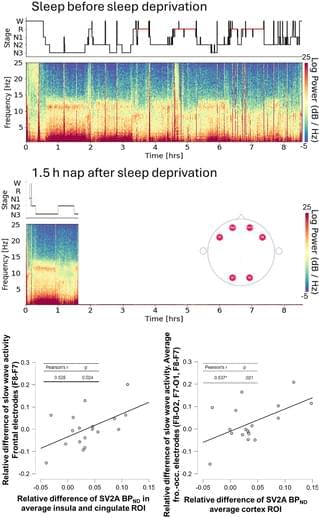
The synaptic homeostasis hypothesis posits that sleep is essential for restoring cerebral equilibrium by downscaling synaptic connections that progressively strengthen and accumulate metabolic costs during wakefulness. While previously supported only by preclinical animal models, a recent study provides direct in vivo evidence of this mechanism in humans. Researchers evaluated 40 volunteers, half of whom underwent 28 hours of continuous sleep deprivation, utilizing Positron Emission Tomography (PET) to quantify levels of the SV2A protein, a reliable biomarker for synaptic density. The findings revealed that prolonged wakefulness significantly elevated SV2A levels across multiple brain regions, most notably in the hippocampus and thalamus. Furthermore, during a subsequent two-hour recovery sleep period, these elevated SV2A levels were strongly correlated with enhanced slow-wave activity, a primary electrophysiological marker of deep sleep and homeostatic sleep pressure. These results validate the synaptic homeostasis hypothesis in humans, demonstrating a measurable biological link between sleep deprivation, the accumulation of neural connections, and the restorative drive for deep, slow-wave sleep.
The synaptic homeostasis hypothesis (SHY) [1– 4] posits that wakefulness promotes synaptic potentiation due to environmental interactions and learning [5]. The strengthening of connections during waking elevates energy consumption, results in the accumulation of proteins and receptors that compete for the limited anatomical space in the skull and diminishes the signal-to-noise ratios in the neuronal network, ultimately saturating the capacity for learning. Sleep allows for synaptic down-selection, preserving energy and network efficiency. While the SHY has been supported by anatomical and molecular studies in animals, human evidence has remained limited due to the invasive nature of most techniques for quantifying synaptic strength.
Studies in animals indicate that anatomical or molecular markers of synaptic strength increase during wake and decline during sleep [6]. Firing rates in rodents indicate increased cortical excitability during wakefulness and decreased cortical excitability during sleep. In humans, cortical excitability is an indirect measure of plasticity. Findings from studies using transcranial magnetic stimulation (TMS) translated the findings from the above-mentioned rodent studies (reviewed in [7]). However, some in-vitro and in-vivo studies of synaptic strength in animals reveal opposite results, which may be due to differences in the type of marker, examined brain regions, cortical layers, or housing of animals (reviewed in [8]).
Synaptic vesicle glycoprotein 2A (SV2A) [9] is an integral membrane protein located on synaptic vesicles. Recent advances in PET imaging with tracers such as [¹⁸F]SynVesT-1 enable the noninvasive measurement of SV2A binding in the living human brain [10,11], allowing new opportunities to examine state-dependent synaptic changes. However, whether this reflects presynaptic terminal number, vesicle complement, SV2A expression per vesicle, or excitatory/inhibitory-synapse composition cannot be resolved with in vivo imaging. While SV2A availability is commonly interpreted as a proxy measure of synaptic density, we refer to it here as ‘SV2A-indexed synaptic density’ to reflect this interpretation while acknowledging its underlying biological ambiguity.