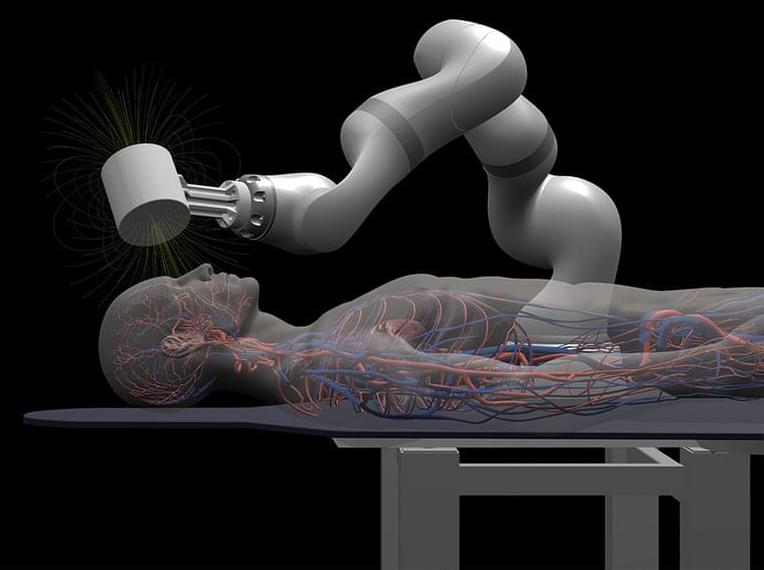
A teleoperated robotic system with magnetic actuation of a guidewire has been used for endovascular stroke intervention.
The researchers conducted a deep dive into the genetics of these tumours, both during the slow chronic phase and after the disease had transformed into the aggressive form. Researchers have identified an important transition point in the shift from chronic to aggressive blood cancer by conducting experiments in mice, providing a new intervention point for hampering the progress of the disease, according to a study.
Nobel Prize-winning physicist Frank Wilczek explores the secrets of the cosmos. Read previous columns here.
This year marks the 10th anniversary of the discovery of the Higgs particle. Now we can see it in perspective.
To understand its significance, imagine an ocean planet where intelligent fish evolve and start to make theories of how things move. They do experiments and deduce equations but it is a messy hodgepodge, because the fish, taking their ever-present environment for granted, think of their ocean as “empty space.” After decades of work, though, some realize that by postulating that “empty space” is a medium—ocean—that has mass and motion of its own, you can account for everything using simple, elegant laws (namely, Newton’s laws). Next, the fish start to wonder what their hypothetical ocean is made of. They boil some ocean, do some sophisticated spectroscopy, and ultimately identify water molecules. Imagined beauty guided them to concrete truth.
Seminar summary: https://foresight.org/summary/career-counseling-with-sonia-arrison/
Join us:
► Twitter: https://twitter.com/foresightinst.
► Facebook: https://www.facebook.com/foresightinst.
► Instagram: https://www.instagram.com/existentialhope/
► LinkedIn: https://www.linkedin.com/company/foresight-institute.
If you enjoy what we do please support us via Patreon: https://www.patreon.com/foresightinstitute.
If you’re interested in joining these meetings consider donating through our donation page: https://foresight.org/donate/
Foresight Institute advances technologies for the long-term future of life, focusing on molecular machine nanotechnology, biotechnology, and computer science.
Subscribe for videos concerning our programs on Molecular Machines, Biotechnology & Health Extension, Intelligent Cooperation, Neurotech, Space, and Existential Hope.

When we are shown two options, our eyes tend to flick from one to the other and back again several times as we deliberate on the pros and cons of each.
Researchers at Johns Hopkins University in the US have found that the speed with which our eyes dart between options gives away our true preference and predicts the ultimate decision we will make.
This quick eye movement – called a saccade – is what allows you to read; your focus travels abruptly from word to word, fixating briefly on some words before moving on to construct meaning from a block of text.


MIT neuroscientists have published a key new insight on how working memory functions, in a study published in PLOS Computational Biology.
The researchers at The Picower Institute for Learning and Memory compared measurements of brain cell activity in an animal performing a working memory task with the output of various computer models representing two theories on the underlying mechanism for holding information in mind.
The results favored the newer theory that a network of neurons stores information by making short-lived changes in the connections, or synapses, between them, rather than the traditional theory that memory is maintained by neurons remaining persistently active.

At first, Professor Wolf Reik couldn’t quite believe the data. The experiment had involved an attempt to “rejuvenate” skin cells taken from a 53-year-old volunteer.
The results were better than anybody had expected: having been bathed in a cocktail of proteins, the cells now looked and behaved like those from somebody in their early twenties.
As different measurements of “biological age” confirmed the findings, the molecular biologist’s scepticism gave way to excitement. “I was falling off my chair three times over,” Reik said.

Orally administered collagen peptides could contribute to antiaging by replacing the degraded extracellular matrix proteins caused by photoaging. This study aimed to evaluate the efficacy and safety of low-molecular-weight collagen peptides for treating photoaged and dry skin. In this randomized, placebo-controlled, parallel-group, double-blinded trial, we randomly assigned study participants (n = 100) to either the test product group or placebo group at a 1:1 ratio for 12 weeks. The wrinkle scale score, eye wrinkle volume, roughness parameters, such as the average maximum height of the wrinkle (Rz), arithmetic average within the total measuring length of the wrinkle (Ra), maximum profile valley depth of the wrinkle (Rv), and skin hydration, transepidermal water loss (TEWL), overall elasticity (R2), and ratio of elastic recovery to total deformation (R7) were evaluated at baseline, 6 weeks, and 12 weeks. Safety assessments with serial blood tests were also conducted. Efficacy assessments of data from 84 participants were conducted as the per-protocol analysis. After 12 weeks, the 10-grade crow’s feet photo scale score, eye wrinkle volume, skin roughness parameters (Rz, Ra, and Rv), skin elasticity (R2 and R7), skin hydration, and TEWL were significantly improved in the test product group compared to the placebo group. There were no adverse events or abnormalities according to laboratory analysis associated with using the test material during the study period. This study showed that the oral supplementation of low-molecular-weight collagen peptides could improve the wrinkles, elasticity, hydration, and barrier integrity of photoaged facial skin. This clinical study was registered with the Korean Clinical Research Information Service and International Clinical Trials Registry Platform (No: KCT0006500).
Keywords: clinical study; collagen peptide; photoaging; wrinkles.

Medium-range weather forecasts play a crucial role in agriculture, construction, travel and other industries. They also bring practical value to people’s daily lives, enabling us to plan outings and keeping us safe from extreme weather events. Traditional numerical weather prediction (NWP)-based forecasting…
{kind=link}