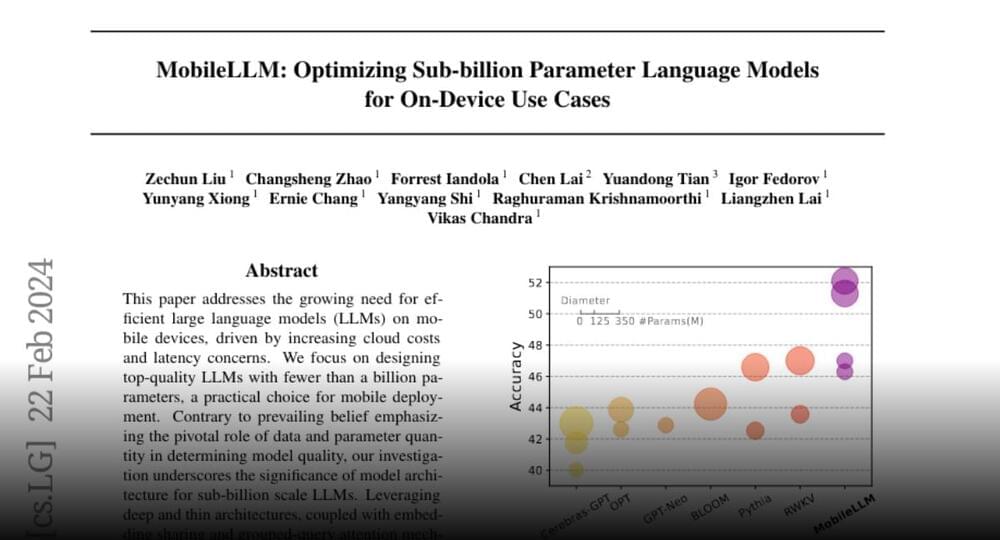
Meta presents MobileLLM
Optimizing sub-billion parameter language models for on-device use cases.
Join the discussion on this paper page.

OpenAI’s new text-to-video model, Sora, will likely remain in development for some time before a public release.
According to Bloomberg, OpenAI has not yet set an exact release schedule. There are two reasons for this: One is that OpenAI does not want to take any safety risks, given the number of elections this year. The second reason is that the model is not yet technically ready for release.
When OpenAI unveiled Sora, the company pointed out shortcomings in the model’s physical understanding and consistency. Bloomberg’s tests with two OpenAI-generated prompts confirmed these issues. For example, in the video below, the parrot turns into a monkey at the end.
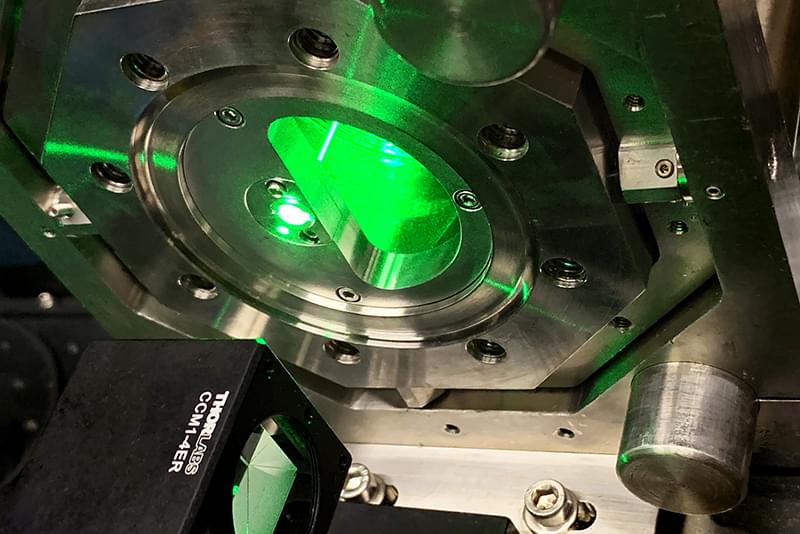
Scientists are getting a more detailed look than ever before at the electrons they use in precision experiments.
Nuclear physicists with the U.S. Department of Energy’s Thomas Jefferson National Accelerator Facility have shattered a nearly 30-year-old record for the measurement of parallel spin within an electron beam – or electron beam polarimetry, for short. The achievement sets the stage for high-profile experiments at Jefferson Lab that could open the door to new physics discoveries.
In a peer-reviewed paper published in the journal Physical Review C (“Ultrahigh-precision Compton polarimetry at 2 GeV”), a collaboration of Jefferson Lab researchers and scientific users reported a measurement more precise than a benchmark achieved during the 1994–95 run of the SLAC Large Detector (SLD) experiment at the SLAC National Accelerator Laboratory in Menlo Park, California.
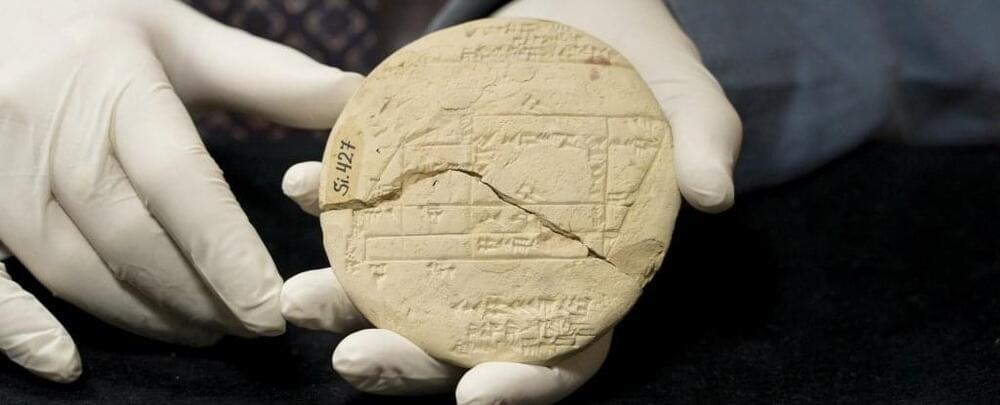
Cira 2021: An ancient fragment of clay tablet dating back to 3,700 years ago, during the Old Babylonian period, contains what is now the oldest known example of applied geometry, a mathematician has discovered. That’s more than a millennium prior to the birth of Pythagoras.
And this history-altering artifact, known as Si.427, had just been sitting in a museum in Istanbul for more than 100 years.
“Si.427 dates from the Old Babylonian (OB) period — 1900 to 1,600 BCE,” said mathematician Daniel Mansfield of the University of New South Wales (UNSW) in Australia.
This definitely is a Lifeboat post embodying what Lifeboat is about, and it’s only about AI. They did a really good job explaining the 10 stages.
This video explores the 10 stages of AI, including God-Like AI. Watch this next video about the Technological Singularity: • Technological Singularity: 15 Ways It…
🎁 5 Free ChatGPT Prompts To Become a Superhuman: https://bit.ly/3Oka9FM
🤖 AI for Business Leaders (Udacity Program): https://bit.ly/3Qjxkmu.
☕ My Patreon: / futurebusinesstech.
➡️ Official Discord Server: / discord.
SOURCES:
• / whats-next-ai-10-stages-igor-van-gemert.
• The Singularity Is Near: When Humans Transcend Biology (Ray Kurzweil): https://amzn.to/3ftOhXI
💡 Future Business Tech explores the future of technology and the world.
Examples of topics I cover include:

While a lot of theories have been centred around attraction, the team found that the insects do not steer directly towards the light, but instead turn their dorsum towards the light. In natural light, this tilting helps insects to maintain the proper flight attitude and control. However, the models developed by the researchers showed that dorsal tilting creates the erratic flight paths around artificial light, causing the insects to continuously steer around the light and become trapped in a constant motion.
“It is the idea that short-range light entrapment is not a navigational disruption, but instead subversion of a basic flight stability reflex, predicting that requirements for stable flight can explain this phenomenon,” says Sondhi.
“The most standout result is that artificial lights confuse insects as to which way is up,” Fabian tells Physics World. “On the ground, we find this obvious. In the air, this is a lot more challenging. In-flight accelerations are indistinguishable from acceleration due to gravity. Simply taking the direction of light as being the sky works, even at night. The night has a lot less light, obviously, but the contrast between sky and ground is just as strong. This is a beautiful, robust way to work out which way is up – until we started lighting up the night.”
A relatively new way to attack cancer, called immunotherapy, is revolutionizing cancer treatment by enabling patients’ own immune systems to attack cancer cells. It hasn’t worked for many kinds of cancers, though — evading the immune system is one of the first tricks that cancer learns. As it turns out, many cancers are also pretty good at hiding from immunotherapies.
In a recent study published in the journal Science, though, Salk Institute researchers have discovered a new way to make cancer visible to immunotherapy. To do this, the team reprogrammed mitochondria — the organelle widely memed as the “powerhouse of the cell” — to make cancer cells easier to find and kill.
The engine of cancer: What connects mitochondria and cancers? Another hallmark of cancer is their uncontrolled growth. Fueling this rapid and relentless proliferation requires a lot of energy. This increased demand is met by changes in how mitochondria function in cancer cells.
Real-Time Artist and Unreal Engine specialist Ayoub Attache, known to many for his jaw-dropping experiments with Epic Games’ game creation tool, has once again blurred the line between the digital realm and real life with a brand-new project.
This time, he has developed an incredible setup for simulating earthquakes in Unreal Engine 5 by simply shaking a smartphone attached to a cutting board surrounded by RC car shock absorbers, which mimic the ground’s movement. The shaking data, including acceleration and gyroscope readings, is then sent via a UDP server straight to Unreal Engine, where it simulates an earthquake affecting a construction site.

Dr. John Swierk: “This is also the first study to explicitly look at inks sold in the United States and is probably the most comprehensive because it looks at the pigments, which nominally stay in the skin, and the carrier package, which is what the pigment is suspended in.”
Do the ingredients in tattoo inks match the labels on their respective bottles? This is what a recent study published in Analytical Chemistry hopes to address as a team of researchers from Binghamton University investigated the accuracy of ink ingredients and what’s labeled on their containers. This study holds the potential to help scientists, artists, and their customers better understand the health risks, to include allergic reactions and other risks, of using the wrong ink ingredients for tattoos.
For the study, the researchers examined ingredients from 54 inks emanating from nine common brands within the United States with the goal of ascertaining their exact chemical compositions compared to what was labeled on their respective bottles. In the end, the researchers identified that 45 of the 54 inks possessed a myriad of pigments and/or additives that were not properly labeled on the bottles that could pose health risks to customers receiving ink tattoos, including allergic skin reactions and other long-term health risks, including non-skin-related risks, such as cancer. Despite the alarming findings, the researchers could not ascertain which unlisted ingredients were intentionally or accidentally added to the inks.
This study comes as Congress passed the Modernization of Cosmetics Regulation Act (MoCRA) in 2022, which grants the Food and Drug Administration (FDA) first-time power to monitor tattoo ink ingredients and their labels. Until MoCRA, the cosmetic industry was almost entirely unregulated.