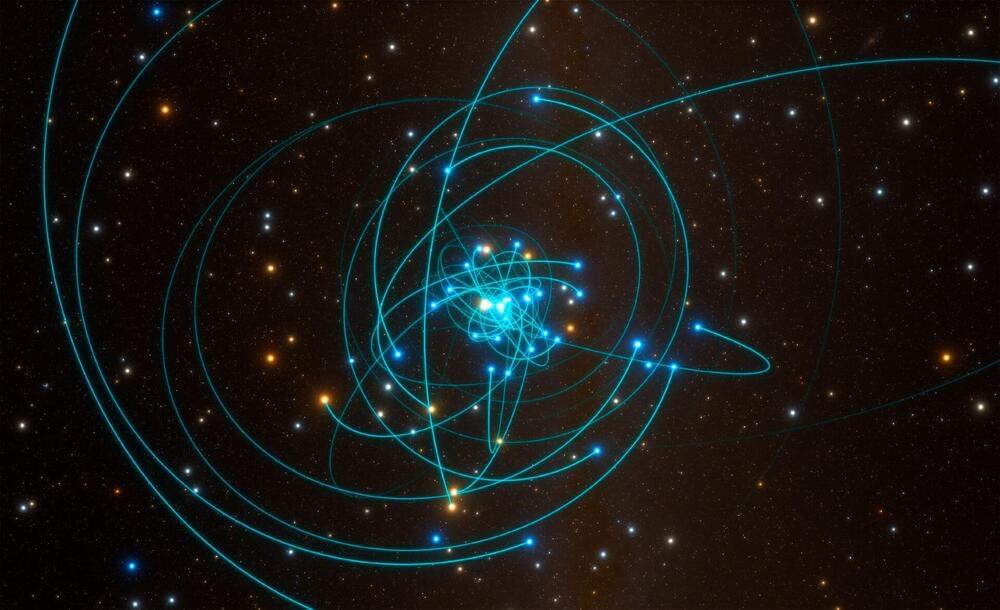
Despite their ancient ages, some stars orbiting the Milky Way’s central supermassive black hole appear deceptively youthful. But unlike humans, who might appear rejuvenated from a fresh round of collagen injections, these stars look young for a much darker reason.
Experts are concerned about the way our planet is rotating due to climate change. For years, scientists have been concerned about the impacts of global warming.
Now, new research has revealed a change in the Earth’s spin due to the melting of the ice poles.
This could see a delay to the ‘leap second’ that was due to be added to the world’s Coordinated Universal Time (UTC) in 2026.
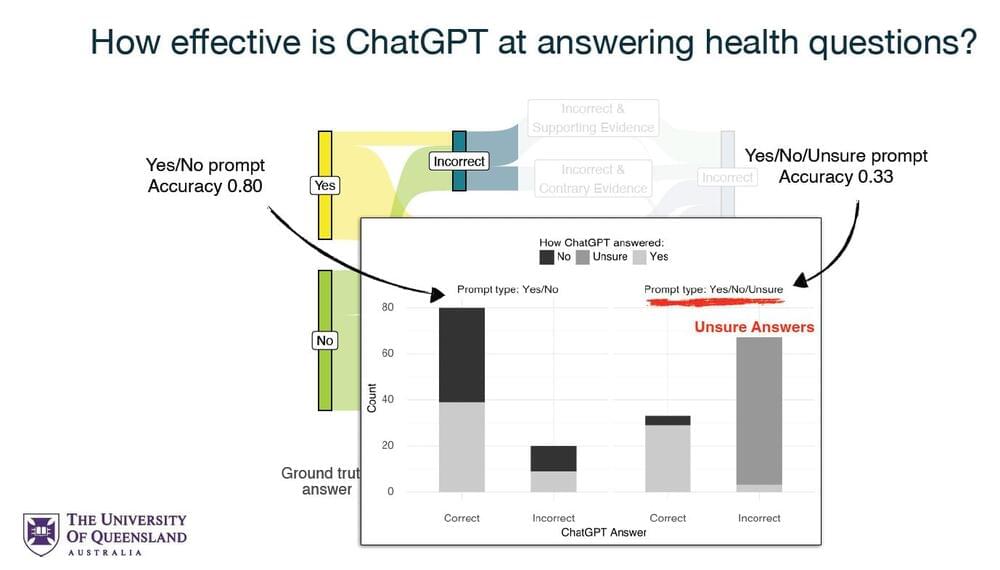
As AI becomes increasingly integral to our daily lives, its ability to provide accurate and reliable information, particularly in sensitive areas such as health, is under intense scrutiny. The study conducted by CSIRO and The University of Queensland researchers brings to light the nuanced ways in which the formulation of prompts influences ChatGPT’s responses. In the realm of health information seeking, where the accuracy of the information can have profound implications, the findings of this study are especially pertinent.
Using the Text Retrieval Conference (TREC) Misinformation dataset, the study precisely evaluated ChatGPT’s performance across different prompting conditions. This analysis revealed that ChatGPT could deliver highly accurate health advice, with an effectiveness rate of 80% when provided with questions alone. However, this effectiveness is significantly compromised by biases introduced through the phrasing of questions and the inclusion of additional information in the prompts.
Study explores how wound microbiota affect skin repair and infection risk by altering host immune responses, underscoring the complexity of microbial interactions in wound healing.
Assisted by quantum physics and machine learning, researchers have developed a transparent window coating that lets in visible light but blocks heat-producing UV and infrared. The coating not only reduces room temperature but also the energy consumption related to cooling, regardless of where the sun is in the sky.
Windows are great. They provide views of the park you live across from or the bird-filled tree outside your office. But, windows can also be not-so-great. Letting in light (and the view) is one thing, but with light comes heat, especially in the hotter months.
On hot days, up to 87% of heat gain in our homes is through windows. UV radiation from sunlight passes easily through glass, heating up the room and increasing the likelihood that you need to turn on the air-con or else forgo any light (and, again, that view) by closing the curtains or lowering the blinds. However, researchers at the University of Notre Dame have developed a window coating that blocks heat-producing UV and infrared light while allowing visible light in, reducing both room temperature and cooling energy consumption.
GPT-4 is already better at changing people’s minds than the average human is, according to new research. The gap widens the more it knows about us – and once it can see us in real time, AI seems likely to become an unprecedented persuasion machine.
We don’t tend to like thinking of ourselves as being particularly easy to manipulate, but history would appear to show that there are few things more powerful than the ability to sway people to align with your view of things. As Yuval Noah Harari points out in Sapiens, his potted history of humankind, “shared fictions” like money, religion, nation states, laws and social norms form the fundamental backbones of human society. The ability to assemble around ideas and co-operate in groups much bigger than our local tribes is one of our most potent advantages over the animal kingdom.
But ideas are mushy. We aren’t born with them, they get into our heads from somewhere, and they can often be changed. Those that can change people’s minds at scale can achieve incredible things, or even reshape our societies – for better and for much worse.
The SpaceX Falcon 9 launch of 21 Starlink satellites from Vandenberg Space Force Base climbs into the atmosphere over Southern California at dusk, April 6, 2024.