Whether it’s a powered prosthesis to assist a person who has lost a limb or an independent robot navigating the outside world, we are asking machines to perform increasingly complex, dynamic tasks. But the standard electric motor was designed for steady, ongoing activities like running a compressor or spinning a conveyor belt – even updated designs waste a lot of energy when making more complicated movements.
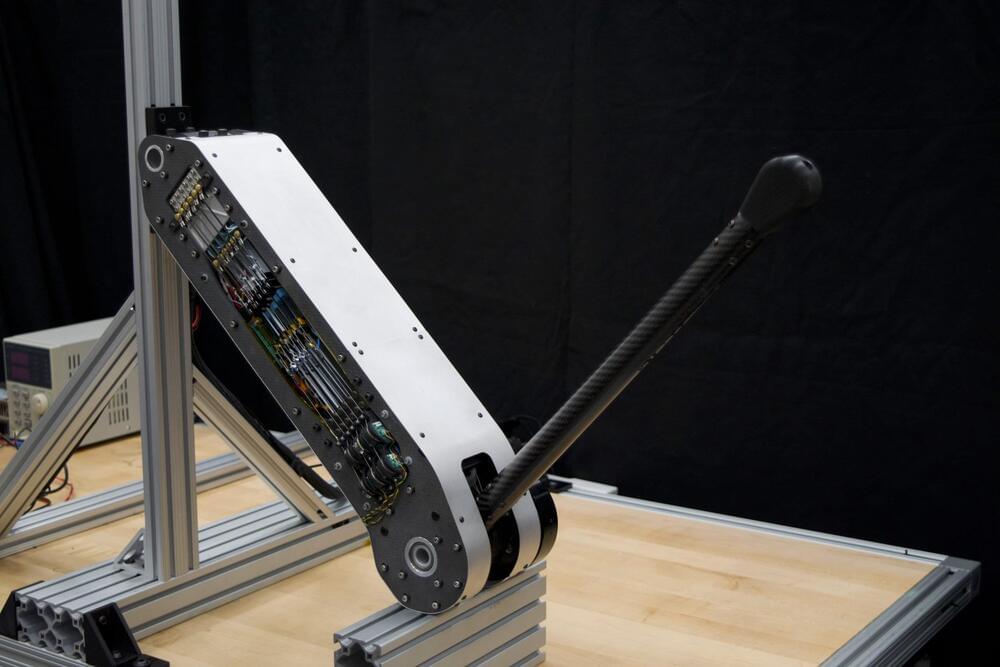
Researchers at Stanford University have invented a way to augment electric motors to make them much more efficient at performing dynamic movements through a new type of actuator, a device that uses energy to make things move. Their actuator, published March 20 in Science Robotics, uses springs and clutches to accomplish a variety of tasks with a fraction of the energy usage of a typical electric motor.
“Rather than wasting lots of electricity to just sit there humming away and generating heat, our actuator uses these clutches to achieve the very high levels of efficiency that we see from electric motors in continuous processes, without giving up on controllability and other features that make electric motors attractive,” said Steve Collins, associate professor of mechanical engineering and senior author of the paper.