A team at Los Alamos National Laboratory has developed a novel approach for comparing neural networks that looks within the “black box” of artificial intelligence to help researchers understand neural network behavior. Neural networks recognize patterns in datasets; they are used everywhere in society, in applications such as virtual assistants, facial recognition systems and self-driving cars.
“The artificial intelligence research community doesn’t necessarily have a complete understanding of what neural networks are doing; they give us good results, but we don’t know how or why,” said Haydn Jones, a researcher in the Advanced Research in Cyber Systems group at Los Alamos. “Our new method does a better job of comparing neural networks, which is a crucial step toward better understanding the mathematics behind AI.”
Jones is the lead author of the paper “If You’ve Trained One You’ve Trained Them All: Inter-Architecture Similarity Increases With Robustness,” which was presented recently at the Conference on Uncertainty in Artificial Intelligence. In addition to studying network similarity, the paper is a crucial step toward characterizing the behavior of robust neural networks.
This #ameca demo couples automated speech recognition with GPT 3 — a large language model that generates meaningful answers — the output is fed to an online TTS service which generates the voice and visemes for lip sync timing. The team at Engineered Arts ltd pose the questions.
Nothing in this video is pre scripted — the model is given a basic prompt describing Ameca, giving the robot a description of self — its pure #ai.
The pauses are the time lag for processing the speech input, generating the answer and processing the text back into speech.
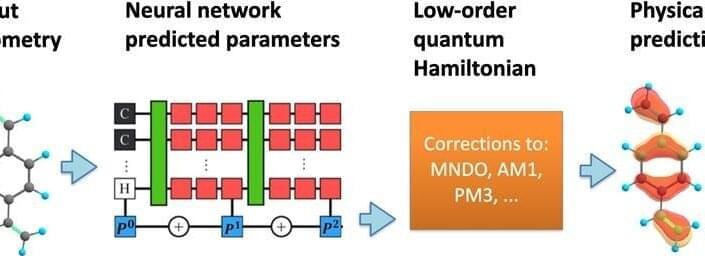
The equations of quantum mechanics provide a roadmap to predicting the properties of chemicals starting from basic scientific theories. However, these equations quickly become too expensive in terms of computer time and power when used to predict behavior in large systems. Machine learning offers a promising approach to accelerating such large-scale simulations.
Researchers have shown that machine learning models can mimic the basic structure of the fundamental laws of nature. These laws can be very difficult to simulate directly. The machine learning approach enables predictions that are easy to compute and are accurate in a wide range of chemical systems.
The improved machine learning model can quickly and accurately predict a wide range of properties of molecules (Proceedings of the National Academy of Sciences, “Deep Learning of Dynamically Responsive Chemical Hamiltonians with Semi-Empirical Quantum Mechanics”). These approaches score very well on important benchmarks in computational chemistry and show how deep learning methods can continue to improve by incorporating more data from experiments. The model can also succeed at challenging tasks such as predicting excited state dynamics—how systems behave with elevated energy levels.
Underwater robots that peered under Antarctica’s Thwaites Glacier, nicknamed the “Doomsday Glacier,” saw that its doom may come sooner than expected with an extreme spike in ice loss. A detailed map of the seafloor surrounding the icy behemoth has revealed that the glacier underwent periods of rapid retreat within the last few centuries, which could be triggered again through melt driven by climate change.
Thwaites Glacier is a massive chunk of ice — around the same size as the state of Florida in the U.S. or the entirety of the United Kingdom — that is slowly melting into the ocean off West Antarctica (opens in new tab). The glacier gets its ominous nickname because of the “spine-chilling” implications of its total liquidation, which could raise global sea levels between 3 and 10 feet (0.9 and 3 meters), researchers said in a statement (opens in new tab). Due to climate change, the enormous frozen mass is retreating twice as fast as it was 30 years ago and is losing around 50 billion tons (45 billion metric tons) of ice annually, according to the International Thwaites Glacier Collaboration (opens in new tab).
The Thwaites Glacier extends well below the ocean’s surface and is held in place by jagged points on the seafloor that slow the glacier’s slide into the water. Sections of seafloor that grab hold of a glacier’s underbelly are known as “grounding points,” and play a key role in how quickly a glacier can retreat.
Daniel Dennett explores the first steps towards a unified theory of information, through common threads in the convergence of evolution, learning, and engineering. Subscribe for regular science talks: http://bit.ly/RiSubscRibe. Watch the Q&A now: https://www.youtube.com/watch?v=beKC_7rlTuw.
Buy Daniel Dennett’s book “Intuition Pumps and Other Tools for Thinking” — https://geni.us/pAyVW
The concept of information is fundamental to all areas of science, and ubiquitous in daily life in the Internet Age. However, it is still not well understood despite being recognised for more than 40 years. In this talk, Daniel Dennett explores steps towards a unified theory of information, through common threads in evolution, learning, and engineering.
This event was the first in a series on the theme of ‘Convergence’, exploring the links between neuroscience, philosophy and artificial intelligence. If you’re in London, look out for more events later in the year: http://rigb.org/whats-on.
We are grateful for the help of the Real Time Club in organising this event.
Daniel Dennett is known as one the most important philosophers of our time, with controversial and thought-provoking arguments about human consciousness, free will, and human evolution.
🔔 Subscribe now with all notifications on for more Elon Musk, SpaceX and Tesla videos!Elon musk has finally tried neuralink on humans! But what is this neuralink? And how much effect will it have on us?The existence of Neuralink was first made public in 2017, when The Wall Street Journal reported on it. The company’s first significant public appearance was in 2019, when Elon Musk and other members of the Neuralink leadership team demonstrated their technology in a live streamed presentation. Neuralink’s chip is roughly the size of a penny and would be implanted in a person’s skull. An array of tiny wires, each nearly 20 times thinner than a human hair, spread out from the chip and into the patient’s brain. The cables include 1,024 electrodes that can monitor brain activity and, potentially, electrically activate the brain. This data is wirelessly transferred by the chip to computers, where it may be examined by researchers. A stiff needle, similar to a sewing machine, would be used to punch the flexible wires emerging from a Neuralink chip into a person’s brain. In January 2021, Neuralink produced a video displaying the robot. Musk claims that the machine will make implanting Neuralink electrodes as simple as LASIK eye surgery. While this is an audacious assertion, neuroscientists told Insider in 2019 that the machine has several extremely promising aspects.📺 Watch the entire video for more information!#elon #musk #neuralink #spacex #tesla #elonmusk.
💼 Business Inquiries and Contact. • For business inquiries, copyright matters or other inquiries please contact us at: [email protected].❓ Copyright Questions. • If you have any copyright questions or issues you can contact us at [email protected].⚠️ Copyright Disclaimers. • We use images and content in accordance with the YouTube Fair Use copyright guidelines. • Section 107 of the U.S. Copyright Act states: “Notwithstanding the provisions of sections 106 and 106A, the fair use of a copyrighted work, including such use by reproduction in copies or phonorecords or by any other means specified by that section, for purposes such as criticism, comment, news reporting, teaching (including multiple copies for classroom use), scholarship, or research, is not an infringement of copyright.” • This video could contain certain copyrighted video clips, pictures, or photographs that were not specifically authorized to be used by the copyright holder(s), but which we believe in good faith are protected by federal law and the fair use doctrine for one or more of the reasons noted above.
The paper argues that AI may want to take control and do its own thing.
Artificial intelligence (AI) has been making impressive progress and has, in many ways, improved the world. But could it become dangerous? A new paper co-authored by the University of Oxford and Google DeepMind researchers published last month in the peer-reviewed AI Magazine.
Devrimb/iStock.
A new paper co-authored by the University of Oxford and Google DeepMind researchers published last month in the peer-reviewed AI Magazine argues that it could. The research stipulates that artificial intelligence could pose an existential risk to humanity.
Visit https://brilliant.org/Veritasium/ to get started learning STEM for free, and the first 200 people will get 20% off their annual premium subscription. Digital computers have served us well for decades, but the rise of artificial intelligence demands a totally new kind of computer: analog.
▀▀▀ References: Crevier, D. (1993). AI: The Tumultuous History Of The Search For Artificial Intelligence. Basic Books. – https://ve42.co/Crevier1993 Valiant, L. (2013). Probably Approximately Correct. HarperCollins. – https://ve42.co/Valiant2013 Rosenblatt, F. (1958). The Perceptron: A Probabilistic Model for Information Storage and Organization in the Brain. Psychological Review, 65, 386–408. – https://ve42.co/Rosenblatt1958 NEW NAVY DEVICE LEARNS BY DOING; Psychologist Shows Embryo of Computer Designed to Read and Grow Wiser (1958). The New York Times, p. 25. – https://ve42.co/NYT1958 Mason, H., Stewart, D., and Gill, B. (1958). Rival. The New Yorker, p. 45. – https://ve42.co/Mason1958 Alvinn driving NavLab footage – https://ve42.co/NavLab. Pomerleau, D. (1989). ALVINN: An Autonomous Land Vehicle In a Neural Network. NeurIPS, 1305-313. – https://ve42.co/Pomerleau1989 ImageNet website – https://ve42.co/ImageNet. Russakovsky, O., Deng, J. et al. (2015). ImageNet Large Scale Visual Recognition Challenge. – https://ve42.co/ImageNetChallenge. AlexNet Paper: Krizhevsky, A., Sutskever, I., Hinton, G. (2012). ImageNet Classification with Deep Convolutional Neural Networks. NeurIPS, (25)1, 1097–1105. – https://ve42.co/AlexNet. Karpathy, A. (2014). Blog post: What I learned from competing against a ConvNet on ImageNet. – https://ve42.co/Karpathy2014 Fick, D. (2018). Blog post: Mythic @ Hot Chips 2018. – https://ve42.co/MythicBlog. Jin, Y. & Lee, B. (2019). 2.2 Basic operations of flash memory. Advances in Computers, 114, 1–69. – https://ve42.co/Jin2019 Demler, M. (2018). Mythic Multiplies in a Flash. The Microprocessor Report. – https://ve42.co/Demler2018 Aspinity (2021). Blog post: 5 Myths About AnalogML. – https://ve42.co/Aspinity. Wright, L. et al. (2022). Deep physical neural networks trained with backpropagation. Nature, 601, 49–555. – https://ve42.co/Wright2022 Waldrop, M. M. (2016). The chips are down for Moore’s law. Nature, 530144–147. – https://ve42.co/Waldrop2016
▀▀▀ Special thanks to Patreon supporters: Kelly Snook, TTST, Ross McCawley, Balkrishna Heroor, 65square.com, Chris LaClair, Avi Yashchin, John H. Austin, Jr., OnlineBookClub.org, Dmitry Kuzmichev, Matthew Gonzalez, Eric Sexton, john kiehl, Anton Ragin, Benedikt Heinen, Diffbot, Micah Mangione, MJP, Gnare, Dave Kircher, Burt Humburg, Blake Byers, Dumky, Evgeny Skvortsov, Meekay, Bill Linder, Paul Peijzel, Josh Hibschman, Mac Malkawi, Michael Schneider, jim buckmaster, Juan Benet, Ruslan Khroma, Robert Blum, Richard Sundvall, Lee Redden, Vincent, Stephen Wilcox, Marinus Kuivenhoven, Clayton Greenwell, Michael Krugman, Cy ‘kkm’ K’Nelson, Sam Lutfi, Ron Neal.
▀▀▀ Written by Derek Muller, Stephen Welch, and Emily Zhang. Filmed by Derek Muller, Petr Lebedev, and Emily Zhang. Animation by Iván Tello, Mike Radjabov, and Stephen Welch. Edited by Derek Muller. Additional video/photos supplied by Getty Images and Pond5 Music from Epidemic Sound. Produced by Derek Muller, Petr Lebedev, and Emily Zhang.
The millennia-old idea of expressing signals and data as a series of discrete states had ignited a revolution in the semiconductor industry during the second half of the 20th century. This new information age thrived on the robust and rapidly evolving field of digital electronics. The abundance of automation and tooling made it relatively manageable to scale designs in complexity and performance as demand grew. However, the power being consumed by AI and machine learning applications cannot feasibly grow as is on existing processing architectures.
THE MAC In a digital neural network implementation, the weights and input data are stored in system memory and must be fetched and stored continuously through the sea of multiple-accumulate operations within the network. This approach results in most of the power being dissipated in fetching and storing model parameters and input data to the arithmetic logic unit of the CPU, where the actual multiply-accumulate operation takes place. A typical multiply-accumulate operation within a general-purpose CPU consumes more than two orders of magnitude greater than the computation itself.
GPUs. Their ability to processes 3D graphics requires a larger number of arithmetic logic units coupled to high-speed memory interfaces. This characteristic inherently made them far more efficient and faster for machine learning by allowing hundreds of multiple-accumulate operations to process simultaneously. GPUs tend to utilize floating-point arithmetic, using 32 bits to represent a number by its mantissa, exponent, and sign. Because of this, GPU targeted machine learning applications have been forced to use floating-point numbers.
ASICS These dedicated AI chips are offer dramatically larger amounts of data movement per joule when compared to GPUs and general-purpose CPUs. This came as a result of the discovery that with certain types of neural networks, the dramatic reduction in computational precision only reduced network accuracy by a small amount. It will soon become infeasible to increase the number of multiply-accumulate units integrated onto a chip, or reduce bit-precision further.
Were you unable to attend Transform 2022? Check out all of the summit sessions in our on-demand library now! Watch here.
The mainframe, the hardware stalwart that has existed for decades, is continuing to be a force in the modern era.
Among the vendors that still build mainframes is IBM, which today announced the latest iteration of its Linux-focused mainframe system, dubbed the LinuxOne Emperor 4. IBM has been building LinuxOne systems since 2015, when the first Emperor mainframe made its debut, and has been updating the platform on a roughly two-year cadence.