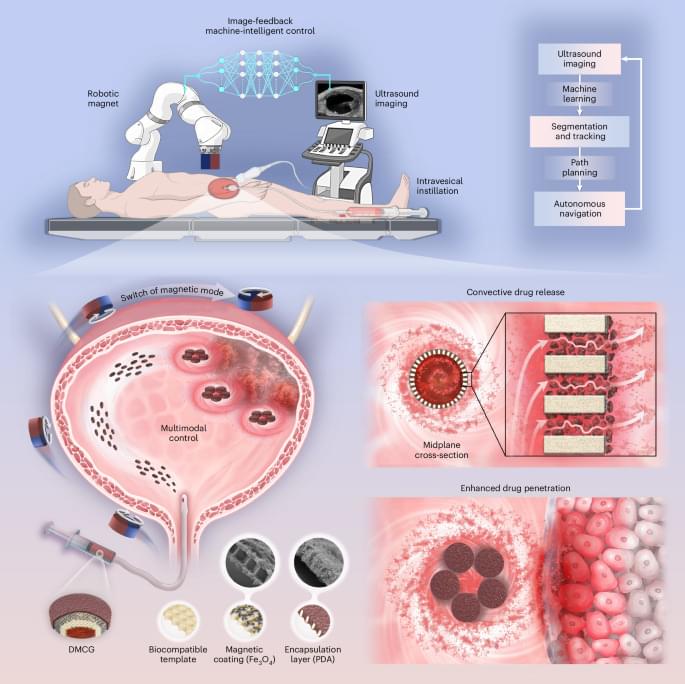
A deep learning-guided image-feedback system enables non-invasive real-time navigation and spatiotemporally controlled intravesical drug release from magnetic biohybrid microrobots in a murine bladder tumour model, enhancing tissue penetration and therapeutic efficacy.