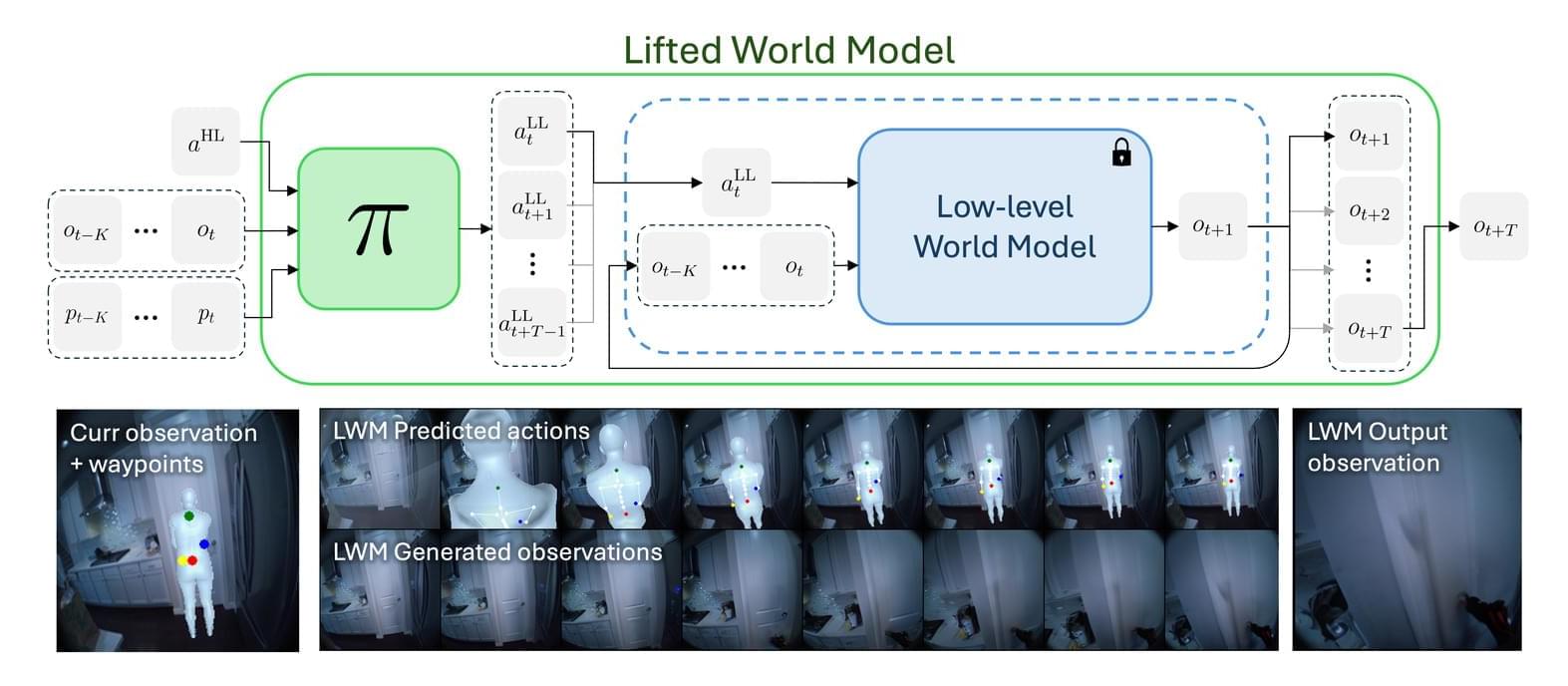
May 12026 Lifting Embodied World Models for Planning and Control A method for lifting low-level world models to higher-level action spaces using waypoints, enabling efficient search-based planning for human-like embodiments.