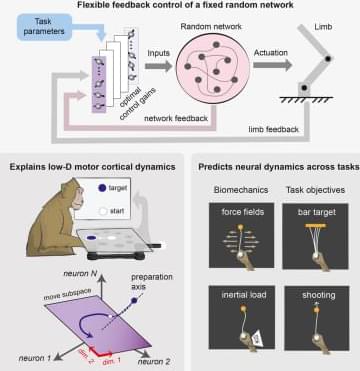
Kalidindi and Crevecoeur develop a computational framework linking feedback-controlled networks to limb dynamics. They demonstrate that optimal control of fixed network reproduces key motor cortical dynamics and predicts neural activity across tasks. Analytical results show low-dimensional patterns emerge from task and biomechanical complexity, thereby bridging neural dynamics with control theory.