To reliably complete household chores, assemble products and tackle other manual tasks, robots should be able to adapt their manipulation strategies based on the objects they are working with, similarly to how humans leverage information they gain via the sense of touch. While humans attain tactile information via nerves in their skin and muscles, robots rely on sensors, devices that sense their surroundings and pick up specific physical signals.
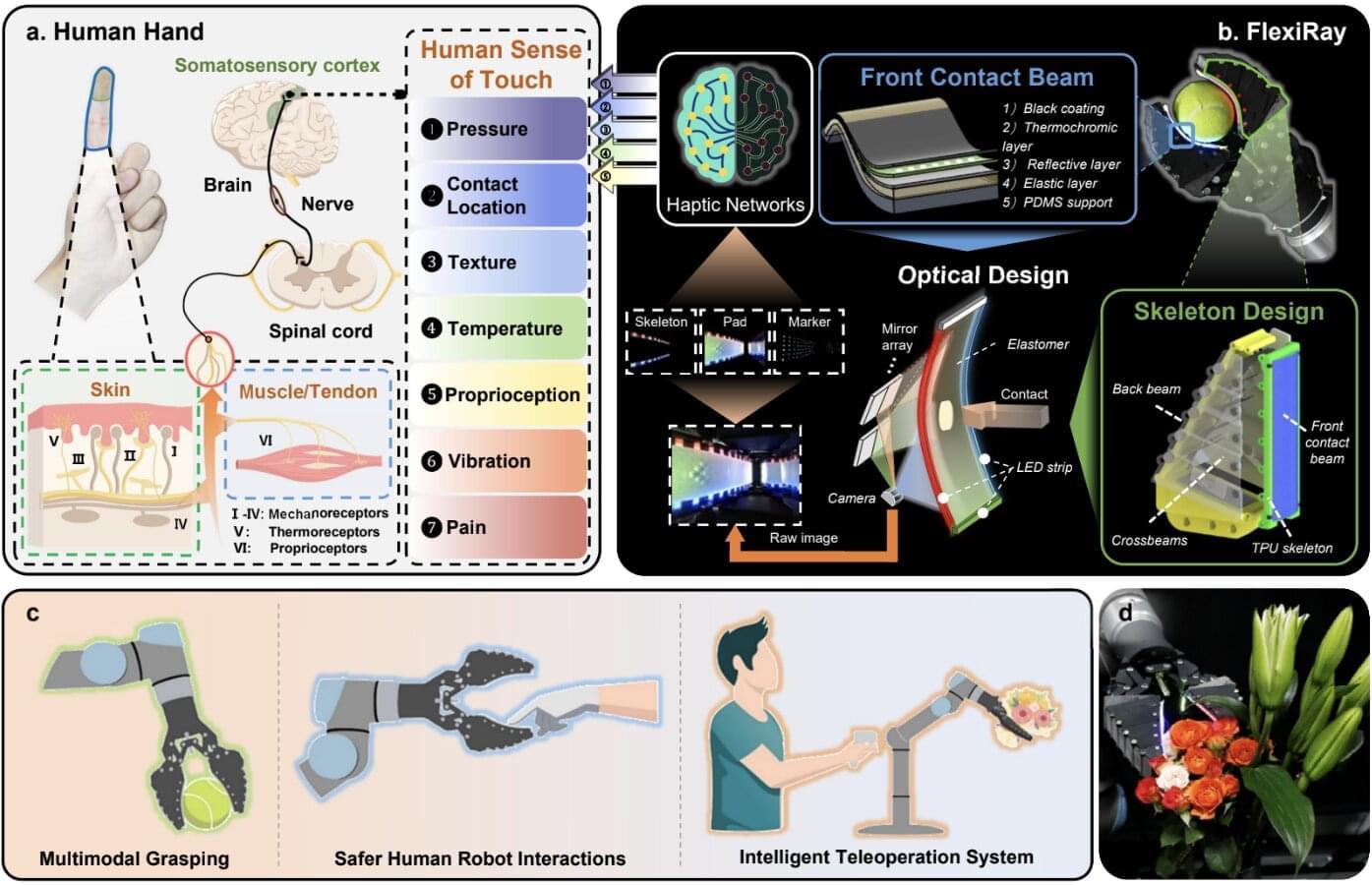
Most robotic hands and grippers developed so far rely on visual-tactile sensors, systems that use small cameras to capture images, while also picking up surface deformations resulting from contact with specific objects.
A key limitation of these sensors is that they need to be made of stiff materials, to ensure that the cameras capture high-quality images. This reduces the overall flexibility of robots that rely on the sensors, making it harder for them to handle fragile and unevenly shaped objects.