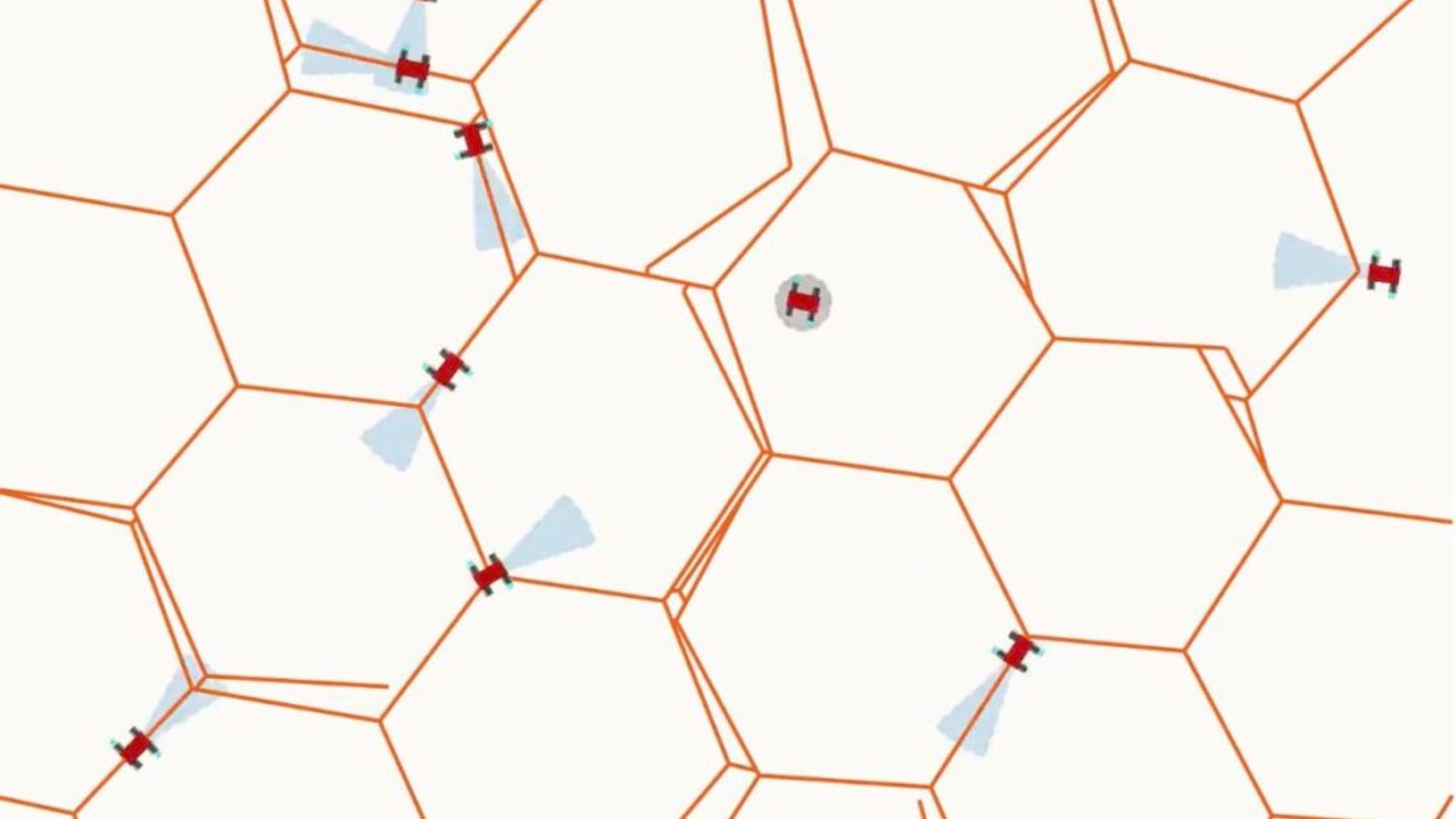
Jun 192025 New robot swarm builds resilient structures without human interference Inspired by insects, these robots follow local cues like turns and distance to build honeycomb patterns that resist failure.