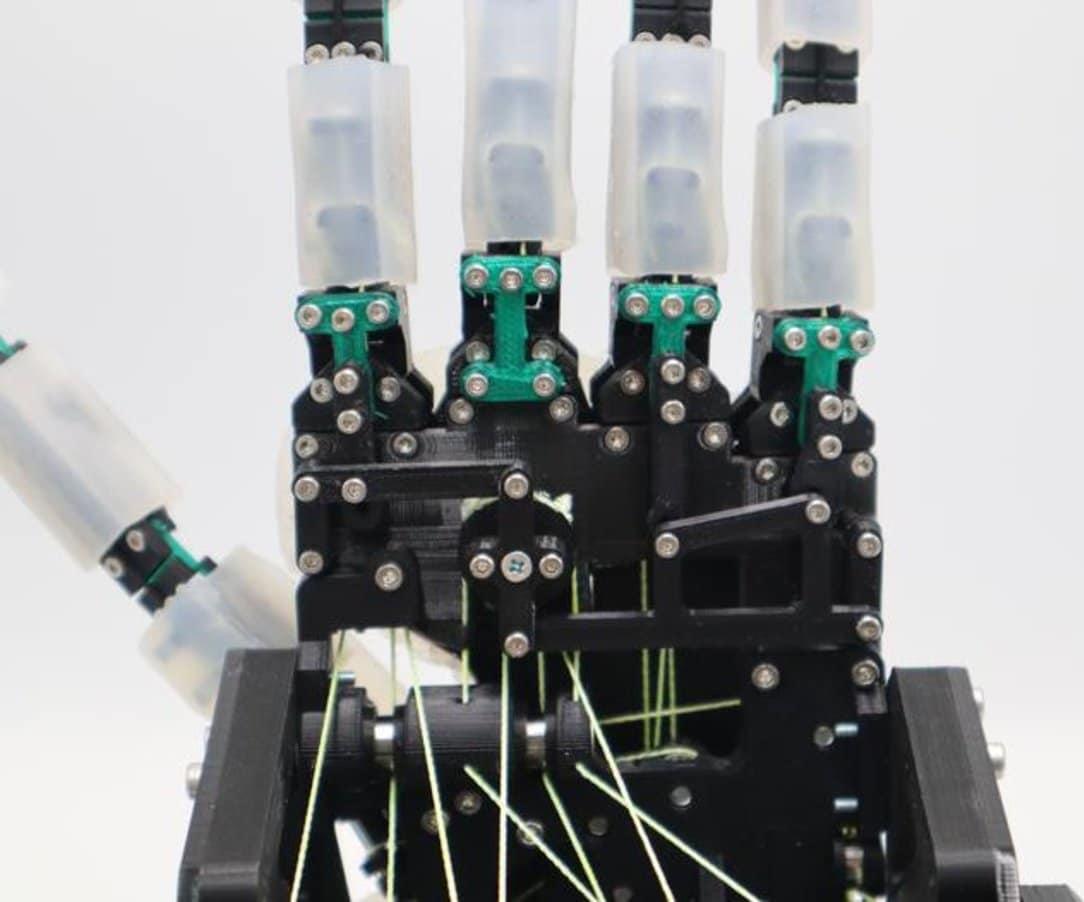
Soft Robots Learn to Grasp with Human-Like Flexibility
A new study reveals how a soft, compliant robotic hand, built with silicone skin, springs, and bendable joints, can self-organize grasps without needing precise environmental data or complex programming.