Mastering diverse control tasks through world models
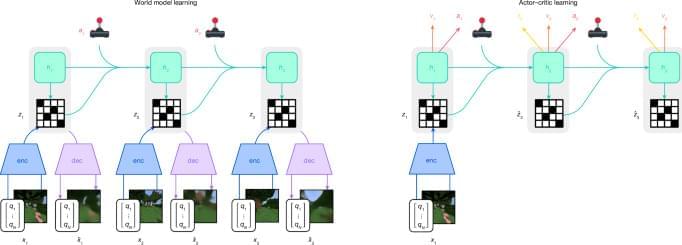
A general reinforcement-learning algorithm, called Dreamer, outperforms specialized expert algorithms across diverse tasks by learning a model of the environment and improving its behaviour by imagining future scenarios.