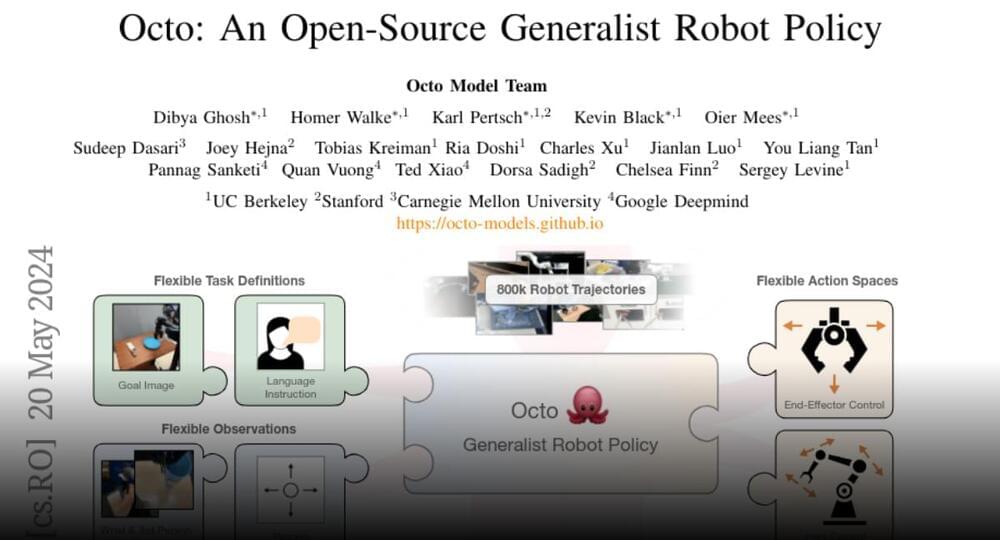
From UC berkeley, stanford, carnegie mellon, & google deepmind.
Octo.
An Open-Source Generalist Robot Policy.
Large policies pretrained on diverse robot datasets have the potential to transform robotic learning: instead of training new policies from scratch,…
Join the discussion on this paper page.