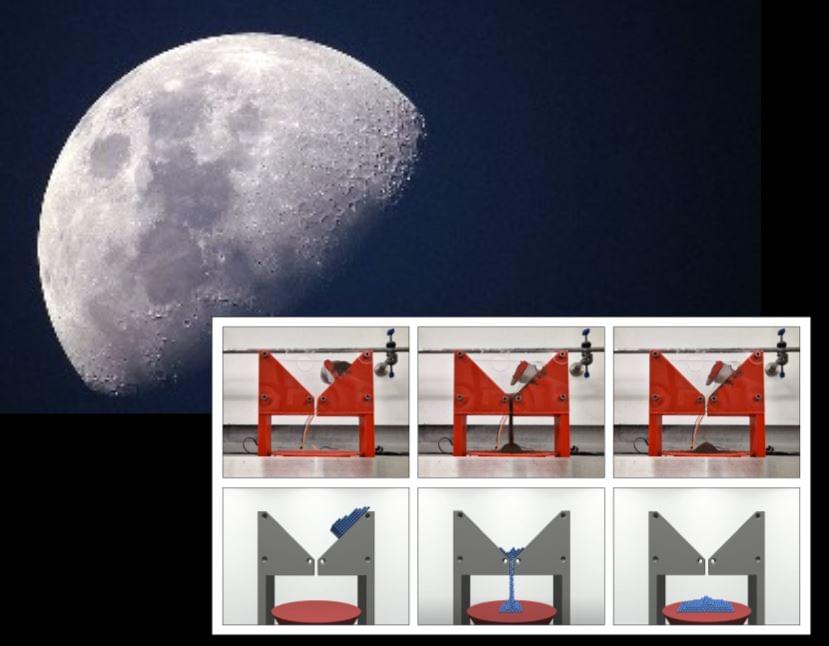
A new computer model mimics Moon dust so well that it could lead to smoother and safer Lunar robot teleoperations. The tool, developed by researchers at the University of Bristol and based at the Bristol Robotics Laboratory, could be used to train astronauts ahead of Lunar missions. Working with their industry partner, Thales Alenia Space in the UK, who has specific interest in creating working robotic systems for space applications, the team investigated a virtual version of regolith, another name for Moon dust.
Lunar regolith is of particular interest for the upcoming Lunar exploration missions planned over the next decade. From it, scientists can potentially extract valuable resources such as oxygen, rocket fuel or construction materials, to support a long-term presence on the Moon. To collect regolith, remotely operated robots emerge as a practical choice due to their lower risks and costs compared to human spaceflight.
However, operating robots over these large distances introduces large delays into the system, which make them more difficult to control. Now that the team know this simulation behaves similarly to reality, they can use it to mirror operating a robot on the Moon. This approach allows operators to control the robot without delays, providing a smoother and more efficient experience.