A team of researchers has developed a new method for controlling lower limb exoskeletons using deep reinforcement learning. The method entitled, “Robust walking control of a lower limb rehabilitation exoskeleton coupled with a musculoskeletal model via deep reinforcement learning,” published in the Journal of NeuroEngineering and Rehabilitation, enables more robust and natural walking control for users of lower limb exoskeletons.
While advances in wearable robotics have helped restore mobility for people with lower limb impairments, current control methods for exoskeletons are limited in their ability to provide natural and intuitive movements for users. This can compromise balance and contribute to user fatigue and discomfort. Few studies have focused on the development of robust controllers that can optimize the user’s experience in terms of safety and independence.
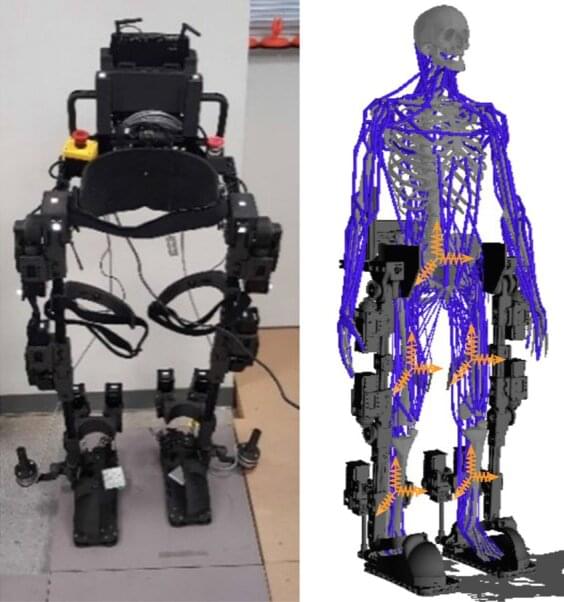
Existing exoskeletons for lower limb rehabilitation employ a variety of technologies to help the user maintain balance, including special crutches and sensors, according to co-author Ghaith Androwis, Ph.D., senior research scientist in the Center for Mobility and Rehabilitation Engineering Research at Kessler Foundation and director of the Center’s Rehabilitation Robotics and Research Laboratory. Exoskeletons that operate without such helpers allow more independent walking, but at the cost of added weight and slow walking speed.