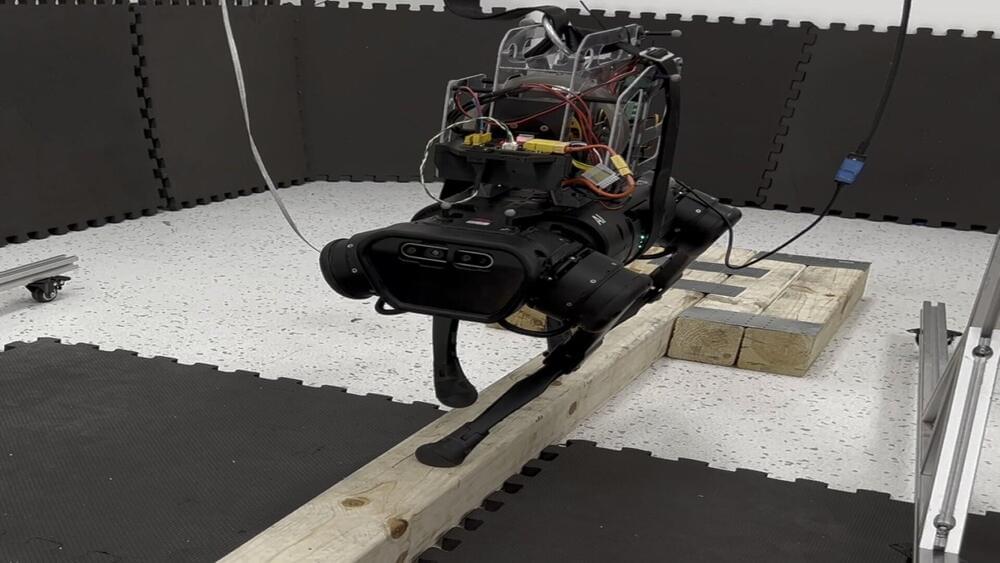
Researchers use a reaction wheel actuator system to make a quadruped robot walk on a narrow balance beam.
A team of researchers at Carnegie Mellon University’s Robotics Institute (RI) has created a method that enables a quadruped robot to walk on a narrow balance beam.
Their solution involves implementing a Reaction Wheel Actuator (RWA) system, which is mounted on the back of the quadruped robot. Through a novel control technique, the RWA system enables the robot to balance independently, irrespective of the position of its feet. To enhance the robot’s balancing capabilities, the team leveraged hardware that is commonly used to control satellites in space.