{kind=link}
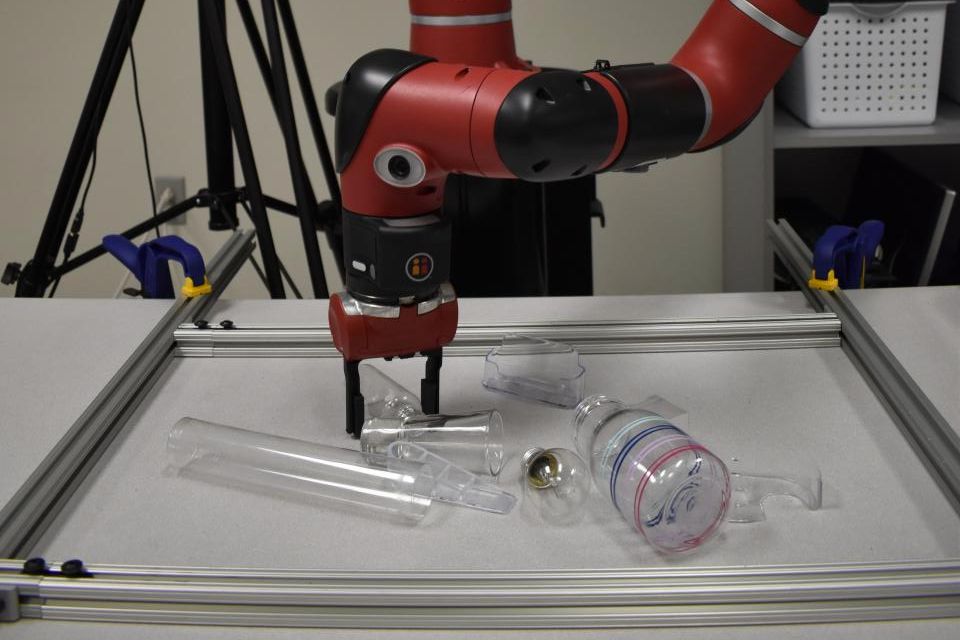
In order to see and then grasp objects, robots typically utilize depth-sensing cameras like the Microsoft Kinect. And while such cameras may be thwarted by transparent or shiny objects, scientists at Carnegie Mellon University have developed a work-around.
Depth-sensing cameras function by shining infrared laser beams onto an object, then measuring the amount of time that it takes for the light to reflect off of the contours of that object, and back to sensors on the camera.
While this system works well enough on relatively dull opaque objects, it has problems with transparent items that much of the light passes through, or shiny objects that scatter the reflected light. That’s where the Carnegie Mellon system comes in, by utilizing a color optical camera that also functions as a depth-sensing camera.