To navigate dynamic environments, autonomous vehicles (AVs) should be able to process all information available to them and use it to generate effective driving strategies. Researchers at the University of California, Berkeley, have recently proposed a social perception scheme for planning the behavior of autonomous cars, which could help to develop AVs that are better equipped to deal with uncertainty in their surrounding environment.
“My research has focused on how to design human-like driving behaviors for autonomous cars,” Liting Sun, one of the researchers who carried out the study, told TechXplore. “Our goal is to build AVs that do not only understand human behavior, but also perform in a similar way in multiple aspects, including perception, reasoning and action.”
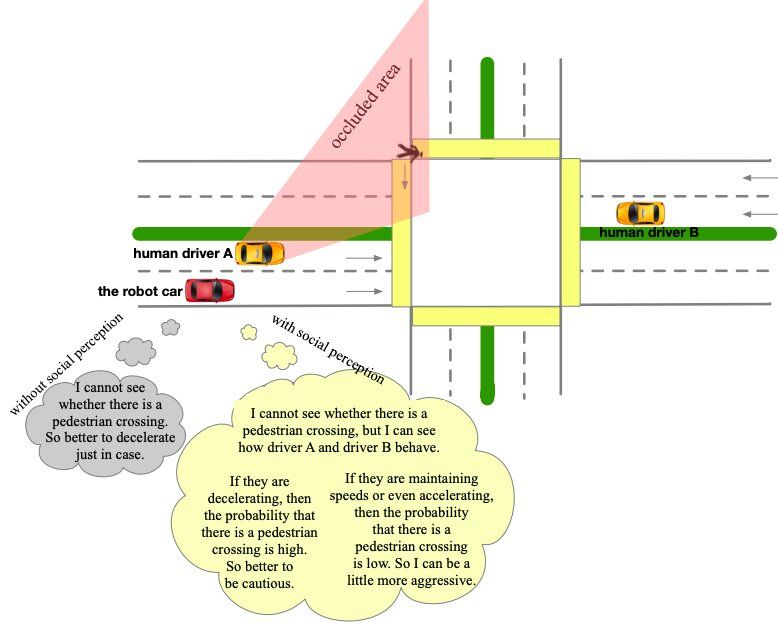
Sun and her colleagues observed that human drivers tend to treat other vehicles as dynamic obstacles, often inferring additional information from their behavior on the road. This information is generally occluded environment information or physically undetectable social information.