
I am a former Microsoft programmer who wrote a book (for a general audience) about the future of software called After the Software Wars. Eric Klien has invited me to post on this blog. Here are several more sections on AI topics. I hope you find these pages food for thought and I appreciate any feedback.
The future is open source everything.
—Linus Torvalds
That knowledge has become the resource, rather than a resource, is what makes our society post-capitalist.
—Peter Drucker, 1993
Imagine 1,000 people, broken up into groups of five, working on two hundred separate encyclopedias, versus that same number of people working on one encyclopedia? Which one will be the best? This sounds like a silly analogy when described in the context of an encyclopedia, but it is exactly what is going on in artificial intelligence (AI) research today.1 Some say free software doesn’t work in theory, but it does work in practice. In truth, it “works” in proportion to the number of people who are working together, and their collective efficiency.
In early drafts of this book, I had positioned this chapter after the one explaining economic and legal issues around free software. However, I now believe it is important to discuss artificial intelligence separately and first, because AI is the holy-grail of computing, and the reason we haven’t solved AI is that there are no free software codebases that have gained critical mass. Far more than enough people are out there, but they are usually working in teams of one or two people, or proprietary codebases.
Deep Blue has been Deep-Sixed
Some people worry that artificial intelligence will make us feel inferior, but then, anybody in his right mind should have an inferiority complex every time he looks at a flower.
—Alan Kay, computer scientist
The source code for IBM’s Deep Blue, the first chess machine to beat then-reigning World Champion Gary Kasparov, was built by a team of about five people. That code has been languishing in a vault at IBM ever since because it was not created under a license that would enable further use by anyone, even though IBM is not attempting to make money from the code or using it for anything.
The second best chess engine in the world, Deep Junior, is also not free, and is therefore being worked on by a very small team. If we have only small teams of people attacking AI, or writing code and then locking it away, we are not going to make progress any time soon towards truly smart software.
Today’s chess computers have no true AI in them; they simply play moves, and then use human-created analysis to measure the result. If you were to go tweak the computer’s value for how much a queen is worth compared to a pawn, the machine would start losing and wouldn’t even understand why. It comes off as intelligent only because it has very smart chess experts programming the computer precisely how to analyze moves, and to rate the relative importance of pieces and their locations, etc.
Deep Blue could analyze two hundred million positions per second, compared to grandmasters who can analyze only 3 positions per second. Who is to say where that code might be today if chess AI aficionados around the world had been hacking on it for the last 10 years?
DARPA Grand Challenge
Proprietary software developers have the advantages money provides; free software developers need to make advantages for each other. I hope some day we will have a large collection of free libraries that have no parallel available to proprietary software, providing useful modules to serve as building blocks in new free software, and adding up to a major advantage for further free software development. What does society need? It needs information that is truly available to its citizens—for example, programs that people can read, fix, adapt, and improve, not just operate. But what software owners typically deliver is a black box that we can’t study or change.
—Richard Stallman
The hardest computing challenges we face are man-made: language, roads and spam. Take, for instance, robot-driven cars. We could do this without a vision system, and modify every road on the planet by adding driving rails or other guides for robot-driven cars, but it is much cheaper and safer to build software for cars to travel on roads as they exist today — a chaotic mess.
At the annual American Association for the Advancement of Science (AAAS) conference in February 2007, the “consensus” among the scientists was that we will have driverless cars by 2030. This prediction is meaningless because those working on the problem are not working together, just as those working on the best chess software are not working together. Furthermore, as American cancer researcher Sidney Farber has said, “Any man who predicts a date for discovery is no longer a scientist.”
Today, Lexus has a car that can parallel park itself, but its vision system needs only a very vague idea of the obstacles around it to accomplish this task. The challenge of building a robot-driven car rests in creating a vision system that makes sense of painted lines, freeway signs, and the other obstacles on the road, including dirtbags not following “the rules”.
The Defense Advanced Research Projects Agency (DARPA), which unlike Al Gore, really invented the Internet, has sponsored several contests to build robot-driven vehicles:
Stanley, Stanford University’s winning entry for the 2005 challenge. It might not run over a Stop sign, but it wouldn’t know to stop.
Like the parallel parking scenario, the DARPA Grand Challenge of 2004 required only a simple vision system. Competing cars traveled over a mostly empty dirt road and were given a detailed series of map points. Even so, many of the cars didn’t finish, or perform confidently. There is an expression in engineering called “garbage in, garbage out”; as such, if a car sees “poorly”, it drives poorly.
What was disappointing about the first challenge was that an enormous amount of software was written to operate these vehicles yet none of it has been released (especially the vision system) for others to review, comment on, improve, etc. I visited Stanford’s Stanley website and could find no link to the source code, or even information such as the programming language it was written in.
Some might wonder why people should work together in a contest, but if all the cars used rubber tires, Intel processors and the Linux kernel, would you say they were not competing? It is a race, with the fastest hardware and driving style winning in the end. By working together on some of the software, engineers can focus more on the hardware, which is the fun stuff.
The following is a description of the computer vision pipeline required to successfully operate a driverless car. Whereas Stanley’s entire software team involved only 12 part-time people, the vision software alone is a problem so complicated it will take an effort comparable in complexity to the Linux kernel to build it:
Image acquisition: Converting sensor inputs from 2 or more cameras, radar, heat, etc. into a 3-dimensional image sequence
Pre-processing: Noise reduction, contrast enhancement
Feature extraction: lines, edges, shape, motion
Detection/Segmentation: Find portions of the images that need further analysis (highway signs)
High-level processing: Data verification, text recognition, object analysis and categorization
The 5 stages of an image recognition pipeline.
A lot of software needs to be written in support of such a system:
The vision pipeline is the hardest part of creating a robot-driven car, but even such diagnostic software is non-trivial.
In 2007, there was a new DARPA Urban challenge. This is a sample of the information given to the contestants:
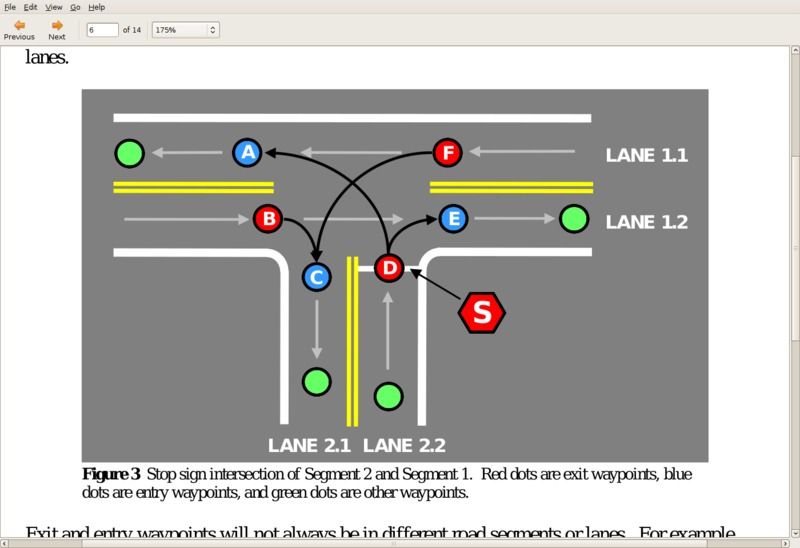
It is easier and safer to program a car to recognize a Stop sign than it is to point out the location of all of them.
Constructing a vision pipeline that can drive in an urban environment presents a much harder software problem. However, if you look at the vision requirements needed to solve the Urban Challenge, it is clear that recognizing shapes and motion is all that is required, and those are the same requirements as had existed in the 2004 challenge! But even in the 2007 contest, there was no more sharing than in the previous contest.
Once we develop the vision system, everything else is technically easy. Video games contain computer-controlled drivers that can race you while shooting and swearing at you. Their trick is that they already have detailed information about all of the objects in their simulated world.
After we’ve built a vision system, there are still many fun challenges to tackle: preparing for Congressional hearings to argue that these cars should have a speed limit controlled by the computer, or telling your car not to drive aggressively and spill your champagne, or testing and building confidence in such a system.2
Eventually, our roads will get smart. Once we have traffic information, we can have computers efficiently route vehicles around any congestion. A study found that traffic jams cost the average large city $1 billion dollars a year.
No organization today, including Microsoft and Google, contains hundreds of computer vision experts. Do you think GM would be gutsy enough to fund a team of 100 vision experts even if they thought they could corner this market?
There are enough people worldwide working on the vision problem right now. If we could pool their efforts into one codebase, written in a modern programming language, we could have robot-driven cars in five years. It is not a matter of invention, it is a matter of engineering.
1 One website documents 60 pieces of source code that perform Fourier transformations, which is an important software building block. The situation is the same for neural networks, computer vision, and many other advanced technologies.
2 There are various privacy issues inherent in robot-driven cars. When computers know their location, it becomes easy to build a “black box” that would record all this information and even transmit it to the government. We need to make sure that machines owned by a human stay under his control, and do not become controlled by the government without a court order and a compelling burden of proof.
I’m all for sharing the road with driverless cars at some point in the future, as long as robot cars are programmed to recognize me flipping them the bird when they cut me off.
“Imagine 1,000 people, broken up into groups of five, working on two hundred separate encyclopedias, versus that same number of people working on one encyclopedia? Which one will be the best?”
We all know how an encyclopedia will “work” — we yet don’t know how AI will work, and that’s the value of having multiple teams working on the problem — we need to yet find *the way*, and that involves multiple explorations.
The number one issue with driverless cars will be the LIABILITY issue. When someone gets smacked by a busload of drunk nuns and your car did or didn’t do something a plaintif thinks it should have.
“The second best chess engine in the world, Deep Junior, is also not free, and is therefore being worked on by a very small team. If we have only small teams of people attacking AI, or writing code and then locking it away, we are not going to make progress any time soon towards truly smart software. ”
Beyond the minor point that Deep Junior is not even in the top ten of modern chess programs (http://ssdf.bosjo.net/), the best program is currently Rybka, which is closed-source commercial. However, there are open-source collaborative efforts, like Stockfish, which are making a run at the top spot. Current chess theory, you are correct, has nothing to do with AI, so it’s not really relevant to the discussion. I think the profit motive will always drive the best R&D, and open-source collaboration is useful in the absence of profit.
Most of the cars on the roads in Los Angeles act like they’re driverless already. Who needs this?
I agree that an independent visual system would be desirable for a driverless car, but equally important would be a series of “road signs” that are tailored for robotic cars. By this, I mean transponders in other vehicles that transmit basic information to nearby vehicles (speed, direction, destination), devices in street signs that wirelessly transmit their content, simple devices in the asphalt that identify the road (maybe just metal flecks? Also a manual override for off road or off grid driving.
@rocketee67: Very funny!
@thrill: Lots of people can tell you at a high level how AI will work. It is a matter of getting people together to hash out the details. This is a lot closer to Wikipedia than it first appears.
@Richard W: Liability is a problem, but not a technical one. Let’s build it and then figure out the legal issues. It is actually not that hard to build something much more reliable than humans.
@Will: Some of those words about chess engines are 4 years old now. Thanks for the new info, I might refresh them. I completely disagree that a proprietary license (which is different from the profit motive) is necessary to write good software. In fact, I have found many cases where proprietary software is technically inferior to its counterpart in free software, just like how Wikipedia is better in many ways than its alternatives. My book discusses a number of them.
@Mike S: We might build transponders in every street corner and such, but in the meanwhile, we need cars that have vision systems. And once we’ve done that, we can just teach it to read Stop signs. There is OCR code out there, but those people aren’t working with the driverless people.
I am more interested in remotely driven vehicles where the lead vehicle is driven from either an UAV or overhead air platform and the rest of the convoy ‘follows’ the lead vehicle by use of software that has it maintain its station in relation to the ‘driven’ vehicle. The obvious application for military convoys should make this an easy sell.
@Lorenzo Poe: Given robust driverless cars, doing convoys is very easy. It is just a matter of telling the car that its goal is to generally stay X meters away from the car ahead of it. The problem is writing the software for the lead car.
Mercedes test failed on the auto-breaking they did. The fog caused problems for them. James
I see no obstacles with regard to vision systems, open or closed. They are available today,
Open source software comes into play in the drivers license test for robots and in accidents. Open source navigation Logic is a test against we can run if there is a dispute in a robot accident. We can ask how the open source navigation runs against scenarios that may have involved an accident. Thus the open source points up toward the likely culprit, either an ambiguous scenario defined in the drivers test or an error in implementation.