New research shows the Greenland shark may live 400 to 500 years. Its genome reveals insights into DNA repair, inflammation control, and human longevity.


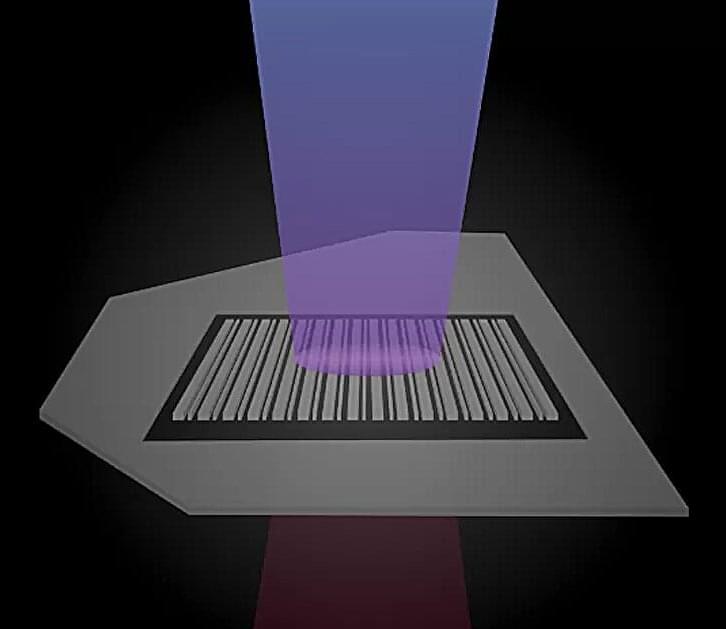
In January, a team led by Jim Schuck, professor of mechanical engineering at Columbia Engineering, developed a method for creating entangled photon pairs, a critical component of emerging quantum technologies, using a crystalline device just 3.4 micrometers thick.
Now, in a paper published in Nature Photonics in October, Columbia Engineers have shrunk nonlinear platforms with high efficiency down to just 160 nanometers by introducing metasurfaces: artificial geometries etched into ultrathin crystals that imbue them with new optical properties.
“We’ve established a successful recipe to pattern ultrathin crystals at the nanoscale to enhance nonlinearity while maintaining their sub-wavelength-thickness,” said corresponding author Chiara Trovatello is currently an assistant professor at Politecnico di Milano and was a Marie Skłodowska-Curie Global Fellow at Columbia working with Schuck.
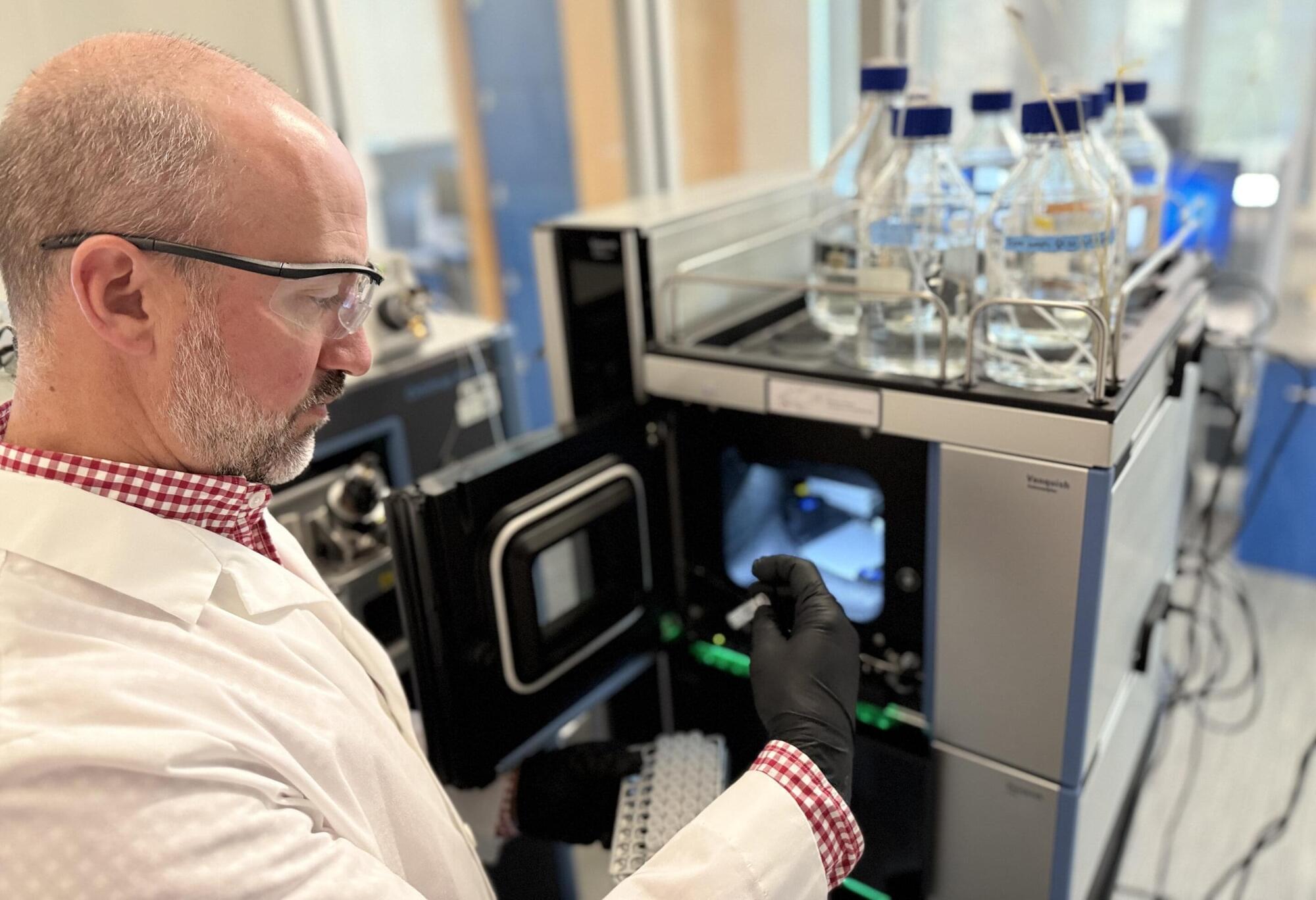
An environmental chemistry laboratory at Duke University has solved a longstanding mystery of the origin of high levels of PFAS—so-called “forever chemicals”—contaminating water sources in the Piedmont region of North Carolina.
By sampling and analyzing sewage in and around Burlington, NC, the researchers traced the chemicals to a local textile manufacturing plant. The source remained hidden for years because the facility was not releasing chemical forms of PFAS that are regulated and monitored. The culprit was instead solid nanoparticle PFAS “precursors” that degrade into the chemicals that current tests are designed to detect.
Incredibly, these precursors were being released into the sewer system at concentrations up to 12 million parts-per-trillion—approximately 3 million times greater than the Environmental Protection Agency’s recently-enacted drinking water regulatory limit for certain types of PFAS.

If “Batman” appears on the scene, we immediately become more altruistic: in fact, research conducted by psychologists from the Università Cattolica del Sacro Cuore, Milan, shows that the sudden appearance of something unexpected—Batman—disrupts the predictability of everyday life and forces people to be present, breaking free from autopilot.
The study was published in the journal npj Mental Health Research, and was led by Francesco Pagnini, Full Professor of Clinical Psychology at the Faculty of Psychology, Università Cattolica.
Prosocial behavior, or the act of helping others, is essential to social life, yet the spontaneous environmental factors that trigger such behavior remain little explored. This study tested the ability of an unexpected event, such as the presence of a person dressed as Batman, to increase prosocial behavior by interrupting routines and increasing people’s attention to the present moment.
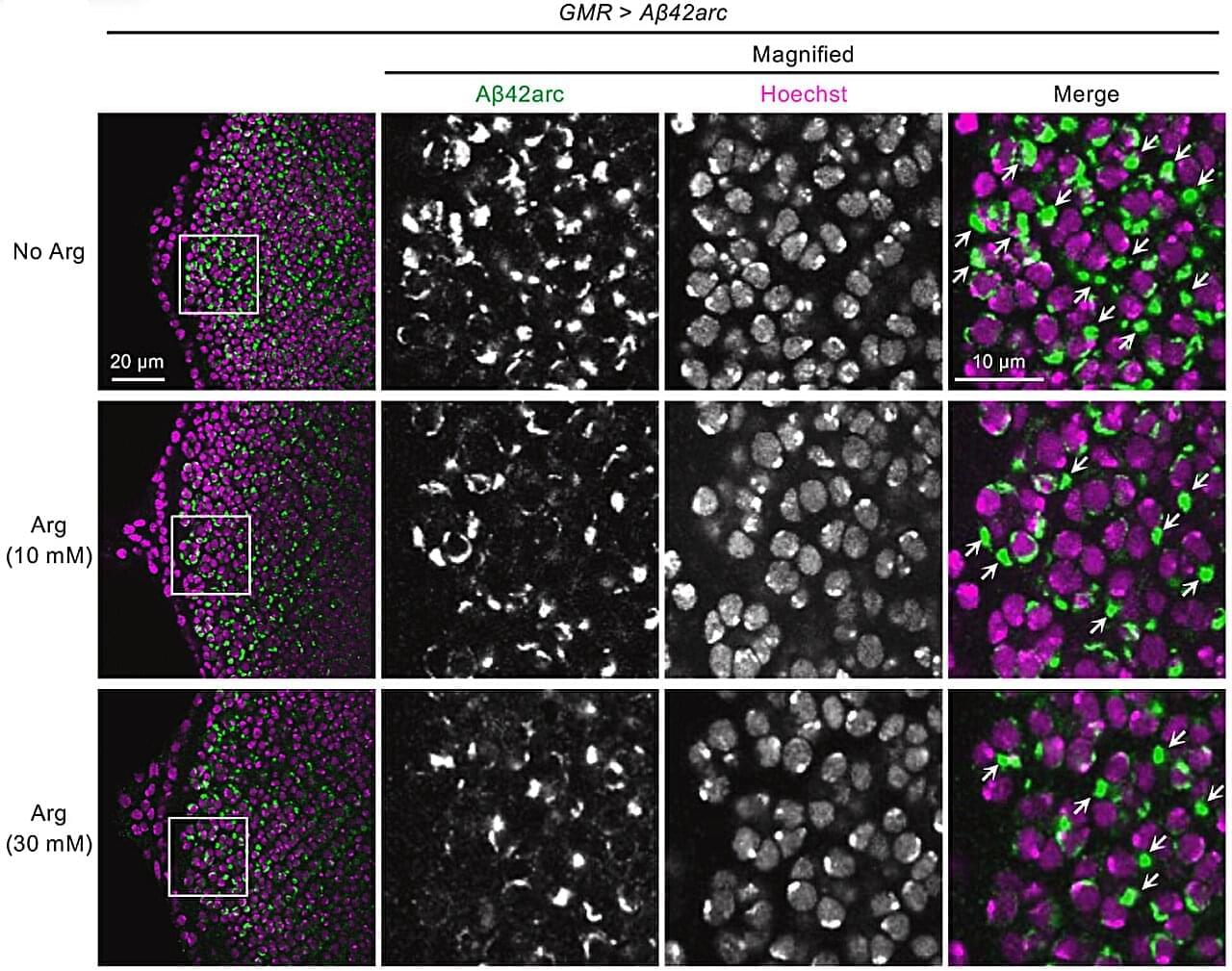
Alzheimer’s disease (AD), a progressive neurodegenerative disorder, is one of the leading causes of dementia worldwide, and currently has no definitive cure. Although antibody-based therapies that target amyloid β (Aβ) have recently been developed, their clinical effectiveness remains limited. These treatments can be costly and cause immune-related side effects, highlighting the need for safer, affordable, and widely accessible approaches that can slow the progression of AD.
In a study, published online on October 30, 2025, in Neurochemistry International, researchers from Kindai University and collaborating institutions discovered that oral administration of arginine, a naturally occurring amino acid and safe chemical chaperone, effectively suppresses Aβ aggregation and its toxic effects in animal models of AD.
The researchers emphasized that although arginine is available as an over-the-counter dietary supplement, the dosage and administration protocol employed in this study was optimized for research purposes and does not correspond to commercially available formulations.

This study investigates CaCu3−xSrxTi4O12 (CCSTO) systems synthesized using the solid-state method, with x compositions of 0.00, 0.15, and 3.00. The samples were modified using 6 wt% graphene oxide (GO) and reduced GO (rGO) prepared via Hummer’s method to evaluate their performance as electrodes in supercapacitors. The results indicate that the addition of 6wt% rGO to CCTO (CCTO-6rGO) led to an improvement in specific capacitance, reaching 237.76 mF·g−1 at a scan rate of 10 mV/s, compared to 29.86 mF·g−1 for pure CCTO and only 7.83 mF·g−1 for CCTO-6GO, suggesting that rGO enhances charge storage. For the CCTO15Sr samples, CCTO15Sr-6rGO exhibited the highest specific capacitance, with 321.63 mF·g−1 at 10 mV/s, surpassing both pure CCTO15Sr (80.19 mF·g−1) and CCTO15Sr-6GO (25.73 mF·g−1). These results stem from oxygen and metal vacancies, which aid charge accumulation and ion diffusion.
Some 200 light years from Earth, the core of a dead star is circling a larger star in a macabre cosmic dance. The dead star is a type of white dwarf that exerts a powerful magnetic field as it pulls material from the larger star into a swirling, accreting disk. The spiraling pair is what’s known as an “intermediate polar” — a type of star system that gives off a complex pattern of intense radiation, including X-rays, as gas from the larger star falls onto the other one.
Now, MIT astronomers have used an X-ray telescope in space to identify key features in the system’s innermost region — an extremely energetic environment that has been inaccessible to most telescopes until now. In an open-access study published in the Astrophysical Journal, the team reports using NASA’s Imaging X-ray Polarimetry Explorer (IXPE) to observe the intermediate polar, known as EX Hydrae.
The team found a surprisingly high degree of X-ray polarization, which describes the direction of an X-ray wave’s electric field, as well as an unexpected direction of polarization in the X-rays coming from EX Hydrae. From these measurements, the researchers traced the X-rays back to their source in the system’s innermost region, close to the surface of the white dwarf.