The system uses neural networks to predict solar storms up to 48 hours in advance.
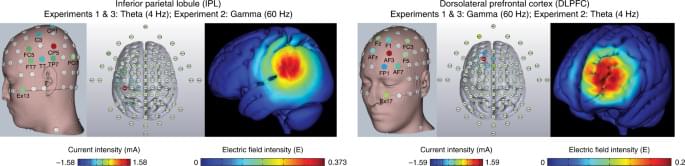
A multi-institutional research group based out of China has put together an “early warning” system that could aid in the accurate prediction of space weather, a press release said.
Every 11 years or so, the magnetic field of the Sun flips completely so that its north pole becomes south, while the south pole becomes north. The changes in the magnetic field of the Sun lead to visible changes on the solar surface, where regions of intense magnetic activity temporarily stop the convection process.
The drop in temperature of that region can be observed by telescopes on Earth as they appear darker than the rest of the solar surface and hence are called sunspots. At times, sunspots end up giving out giant eruptions of energy and material, which are called solar flare and coronal mass ejections (CMEs), respectively.