Scientists have used state-of-the-art 3D printing and microscopy to provide a new glimpse of what happens when taking magnets to three-dimensions on the nanoscale—1000 times smaller than a human hair.
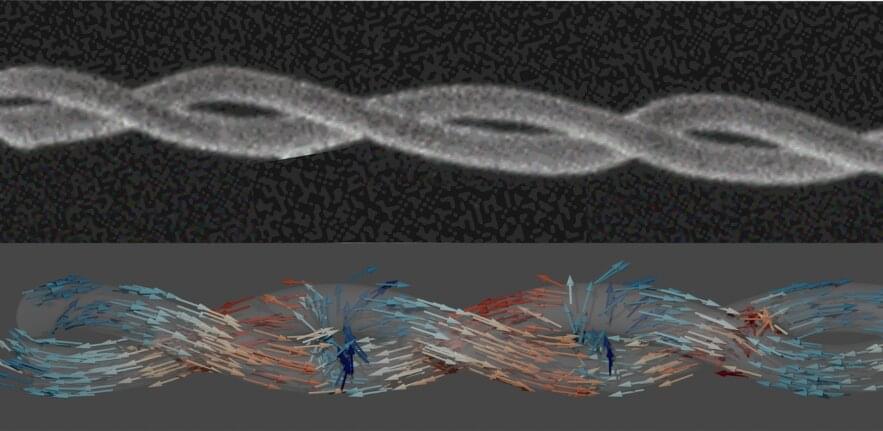
The international team led by Cambridge University’s Cavendish Laboratory used an advanced 3D printing technique they developed to create magnetic double helices—like the double helix of DNA—which twist around one another, combining curvature, chirality, and strong magnetic field interactions between the helices. Doing so, the scientists discovered that these magnetic double helices produce nanoscale topological textures in the magnetic field, something that had never been seen before, opening the door to the next generation of magnetic devices. The results are published in Nature Nanotechnology.
Magnetic devices impact many different parts of our societies, magnets are used for the generation of energy, for data storage and computing. But magnetic computing devices are fast approaching their shrinking limit in two-dimensional systems. For the next generation of computing, there is growing interest in moving to three dimensions, where not only can higher densities be achieved with 3D nanowire architectures, but three-dimensional geometries can change the magnetic properties and offer new functionalities.