It’s difficult to speak of the far future of the universe with any level of precision, but we can make rough estimates. Our cosmos is currently 13.77 billion years old, and galaxies throughout the universe will continue making new stars for many years to come. But eventually—roughly one trillion years from now—the last star will be born.
That star will likely be a small red dwarf, barely a fraction of our sun’s mass. Red dwarf stars live fantastically long lives, gently sipping on hydrogen to power a slow but steady fusion reaction. But eventually, all stars, including the red dwarfs, will come to an end. In roughly 100 trillion years, the last light will go out.
To try everything Brilliant has to offer—free—for a full 30 days, visit http://brilliant.org/ArtemKirsanov/. The first 200 of you will get 20% off Brilliant’s annual premium subscription.
My name is Artem, I’m a computational neuroscience student and researcher. In this video we talk about the concept of critical point – how the brain might optimize information processing by hovering near a phase transition.
In recent years, the field of artificial intelligence has made tremendous strides, but what happens when #AI systems become #selfaware? In this video, we’ll explore the concept of AI self-awareness, its #scary implications for society, and what it means for the #future of AI.
AI self-awareness is the ability of an #artificialintelligence system to recognize its own existence and understand the consequences of its actions. While there are different levels of self-awareness that an AI system could potentially exhibit, it generally involves the system being able to recognize and respond to changes in its own state. One way that researchers are exploring AI self-awareness is by using neural networks and other machine learning algorithms. For example, researchers have created AI systems that can recognize and respond to their own errors, which is an important first step in developing higher-order self-awareness.
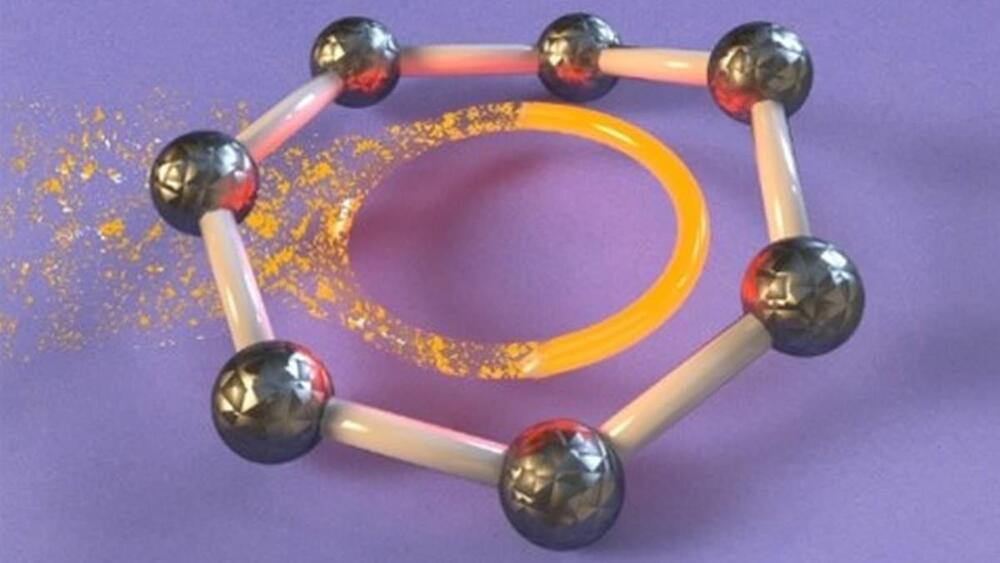
Aromatic bonds, particularly strong chemical bonds which form in some ring-shaped molecules, are a crucial building block of the world around us. They appear in everything from proteins to aspirin, and literally millions of natural and synthetic substances in between.
The bonds are very hard to break and to control, and their properties have puzzled chemists for more than a century.
Which is just the motivation chemists needed to break and control them, and now a group of UK researchers has figured out how to twist an aromatic bond until it breaks.
Despite AI’s impressive track record, its computational power pales in comparison with a human brain. Now, scientists unveil a revolutionary path to drive computing forward: organoid intelligence, where lab-grown brain organoids act as biological hardware.
Artificial intelligence (AI) has long been inspired by the human brain. This approach proved highly successful: AI boasts impressive achievements – from diagnosing medical conditions to composing poetry. Still, the original model continues to outperform machines in many ways. This is why, for example, we can ‘prove our humanity’ with trivial image tests online. What if instead of trying to make AI more brain-like, we went straight to the source?
Scientists across multiple disciplines are working to create revolutionary biocomputers where three-dimensional cultures of brain cells, called brain organoids, serve as biological hardware. They describe their roadmap for realizing this vision in the journal Frontiers in Science.
Photon-enabled quantum communication could send exponential amounts of data securely over interstellar distances, potentially to intelligent ET societies.
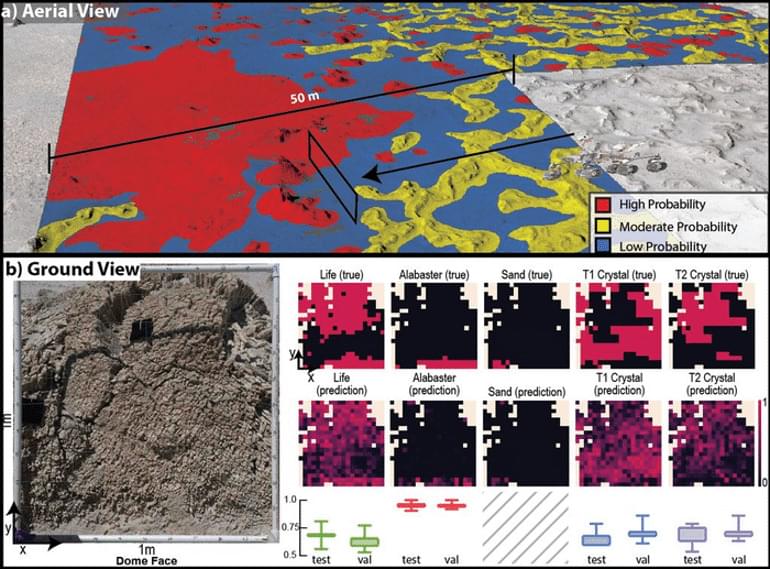
Summary: Scientists have developed a way to use artificial intelligence (AI) to find signs of life on other planets. They combined statistical ecology and machine learning to map the patterns and rules of how life survives in harsh environments on Earth, and then trained the AI to recognize those same patterns and rules in data from other planets. This method can help guide rovers and other exploration missions to places with the highest probability of containing life.
Source: SETI Institute.
Wouldn’t finding life on other worlds be easier if we knew exactly where to look? Researchers have limited opportunities to collect samples on Mars or elsewhere or access remote sensing instruments when hunting for life beyond Earth.
US aerospace start-up Relativity Space is planning to launch its 3D-printed Terran 1 rocket on 8 March, skipping planned tests and heading straight for orbit.
A new study has shown that bumblebees pick up new “trends” in their behavior by watching and learning from other bees, and that one form of a behavior can spread rapidly through a colony even when a different version gets discovered.
The research, led by Queen Mary University of London and published in PLOS Biology, provides strong evidence that social learning drives the spread of bumblebee behavior—in this case, precisely how they forage for food.
A variety of experiments were set up to establish this. The researchers designed a two-option puzzle box that could be opened either by pushing a red tab clockwise or a blue tab counter-clockwise to reveal a 50% sucrose solution reward.