We already have technology that allows wildlife to pass vaccines among themselves, and developing methods may speed up the process. But critics claim that they risk human infections and criminal misuse.
We already have technology that allows wildlife to pass vaccines among themselves, and developing methods may speed up the process. But critics claim that they risk human infections and criminal misuse.
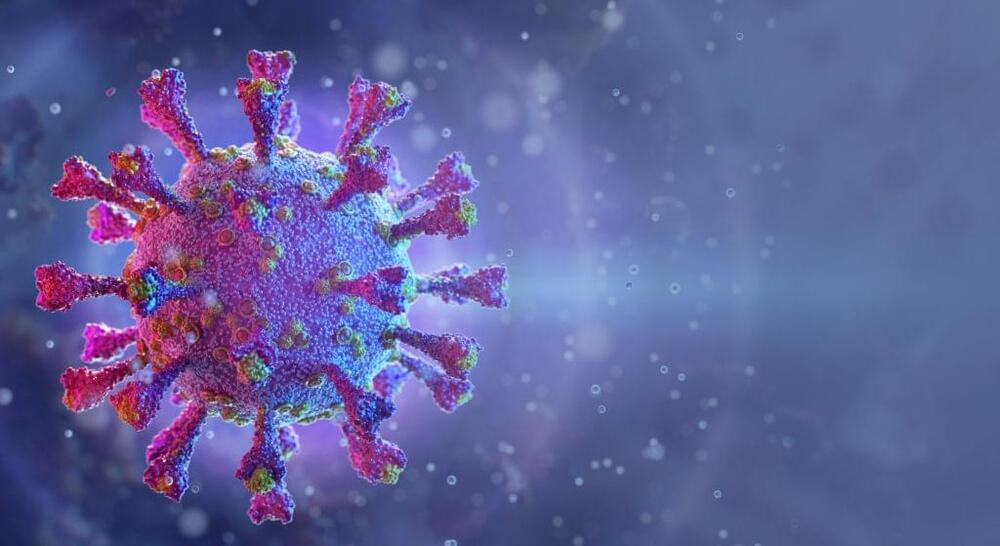
Scientists have discovered a way to stop the COVID-19 virus from replicating in infected human cells, marking major progress towards a definitive treatment for the deadly illness and accentuating the potential of genetic engineering to cure viral diseases.
The study explores the use of CRISPR, a genome editing tool, and builds on research that started at Australia’s Peter MacCallum Cancer Center in 2019, when Dr. Mohamed Fareh and Prof. Joe Trapani showed that CRISPR could be used to eliminate abnormal RNAs that drive children’s cancers.
At the beginning of the pandemic, and in collaboration with Director Prof. Sharon Lewin and Dr. Wei Zhao from the Doherty Institute, the scientists reprogrammed the same CRISPR tool to suppress replication of the RNA virus SARS-CoV-2 — and importantly, its “variants of concern” — in a test tube model. SARS-CoV-2, which is short for Severe Acute Respiratory Syndrome Coronavirus 2, is the virus that causes COVID-19.

Yet another EV start-up has plans for an electric truck, and this one has a few things in common with the Cybertruck. Here’s what it plans to offer.
The Cybertruck won’t be out for another year at the earliest, but it keeps inviting fresh competition from EV start-ups and established automakers alike. The latest such hopeful arrived at the LA auto show a few days ago, featuring styling that could be described as a smoothed-out Cybertruck.
The latest contender concept hails from EdisonFuture, not to be confused with Faraday Future, and like Tesla it is once again named after a 19th century electrical pioneer. (Yes, most of the names of 19th century electrical innovators are already taken by EV start-ups).
Barely a year after the Korea Superconducting Tokamak Advanced Research (KSTAR) broke one record for fusion, it’s smashed it again, this time holding onto a churning whirlpool of 100 million degree plasma for a whole 30 seconds.
Though it’s well short of the 101 seconds set by the Chinese Academy of Sciences earlier this year, it remains a significant milestone on the road to cleaner, near-limitless energy that could transform how we power our society.
Here’s why it’s so important.
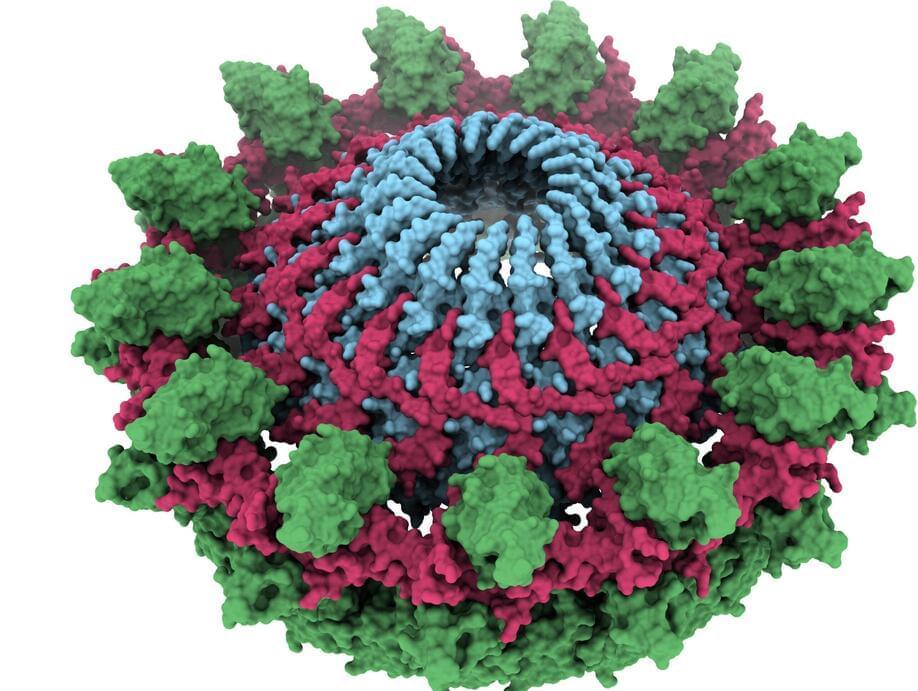
Researchers have imaged a major component in conjugation—the process bacteria use to share DNA with each other.
During conjugation, bacteria can exchange genetic information in the form of special pieces of DNA. These include genes that help them resist attacks from common antimicrobial drugs, making many illnesses caused by these bacteria resistant to treatment.
Better understanding conjugation could therefore allow scientists to find ways to stop the process and reduce the spread of antimicrobial resistance.
SpaceX is determined to send people to Mars by 2024. But what will they do after reaching Mars? What’s their plan for the red planet? It’s quite normal for us to ask such questions. In this article, we will find the answers to these inquiries.
Billionaire Elon Musk founded SpaceX with the vision of colonizing Mars. SpaceX is already building the next-generation spacecraft Starship to make his dream real. This company has a plan to send uncrewed missions to Mars within 2022 by the Starship and crewed missions within 2024.
But landing on Mars is not the ultimate goal of SpaceX. They aim to build a permanent settlement for humans on the planet. We can understand that living on Mars is not going to be easy for us because it’s not our natural habitat.

Tesla CEO Elon Musk vended about$1.05 billion in stock on Tuesday evening, according to fiscal forms posted this week. The deals were listed in September to exercise options that were set to expire in 2022.Musk has vended a aggregate of$9.85 billion in Tesla stock this month including the$6.9 billion he vended the week ofNov.10 and another$1.9 billion he vended onNov. 15 andNov. 16. Some of the shares were vended in part to satisfy duty scores related to an exercise of stock options. Musk and his trust still hold further than 169 million shares in the company.
Tesla shares fell15.4 the week endedNov.12 marking the worst week for Tesla stock in 20 months after Musk began dealing shares. Shares of Tesla were over about 1 on Wednesday autumn. Musk ran an informal Twitter bean onNov.6 asking his further than 60 million Twitter followers whether or not he should vend 10 of his Tesla stock. The bean eventually ended with druggies telling Musk to vend.
But Musk had formerly indicated before this time he was likely to vend a huge block of his options in the fourth quarter. During an appearance at the Code Conference in September he said when his stock options expire at Tesla his borderline duty rate would be over 50.
Many people think that mathematics is a human invention. To this way of thinking, mathematics is like a language: it may describe real things in the world, but it doesn’t ‘exist’ outside the minds of the people who use it.
The idea of artificial intelligence overthrowing humankind has been talked about for many decades, and in January 2021, scientists delivered their verdict on whether we’d be able to control a high-level computer super-intelligence. The answer? Almost.
The idea of artificial intelligence overthrowing humankind has been talked about for many decades, and in January 2021, scientists delivered their verdict on whether we’d be able to control a high-level computer super-intelligence. The answer? Almost definitely not.
The catch is that controlling a super-intelligence far beyond human comprehension would require a simulation of that super-intelligence which we can analyze. But if we’re unable to comprehend it, it’s impossible to create such a simulation.
Rules such as ‘cause no harm to humans’ can’t be set if we don’t understand the kind of scenarios that an AI is going to come up with, suggest the authors of the 2021 paper. Once a computer system is working on a level above the scope of our programmers, we can no longer set limits.
Friends Lunch with a Member.
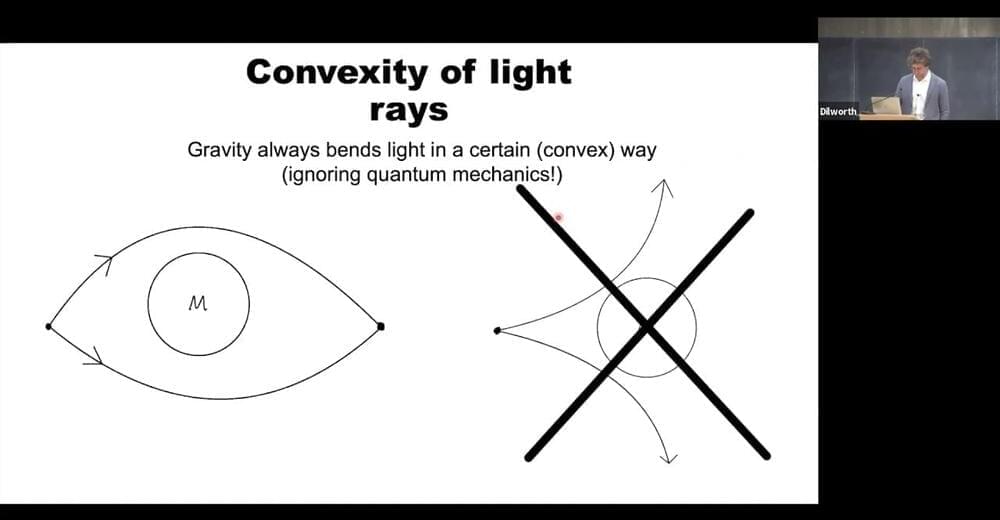
Topic: Negative Energy, Quantum Information and Causality.
Speaker: Adam Levine.
Date: November 19, 2021
Einstein’s equations of gravity show that too much negative energy can lead to causality violations and causal paradoxes such as the so-called “grandfather paradox. In quantum mechanics, however, negative energies can arise from intrinsically quantum effects, such as the Casimir effect. Thus, it is not clear that gravity and quantum mechanics can be self-consistently combined. In this talk, Levine will discuss modern advances in understanding the connection between energy and causality in gravity and how quantum gravity avoids obvious paradoxes. He will also explore how this line of thought leads to new insights in quantum field theory, which governs particle physics.
As a physicist, Adam Levine’s research aims to understand the structure of entanglement in quantum field theories and quantum gravity through use of techniques from the study of conformal field theories, as well as quantum information theory and AdS/CFT. With support from the National Science Foundation, Adam is a long term Member in the School of Natural Sciences. He received his Ph.D. from University of California, Berkeley (2019), was a Graduate Fellow at the Kavli Institute for Theoretical Physics (2018), a National Defense Science and Engineering Graduate Fellow (2017−2020), and received the Jeffrey Willick Memorial Award for Outstanding Scholarship in Astrophysics from Stanford University (2015).