Until now, when scientists created magnetic robots, their magnetization profiles were generally fixed, enabling only a specific type of shape programming capability using applied external magnetic fields. Researchers at the Max Planck Institute for Intelligent Systems (MPI-IS) have now proposed a new magnetization reprogramming method that can drastically expand the complexity and diversity of the shape-programming capabilities of such robots.
They built a soft robot with a magnetization profile that can be altered in real time and in situ. Their findings are published in Nature.
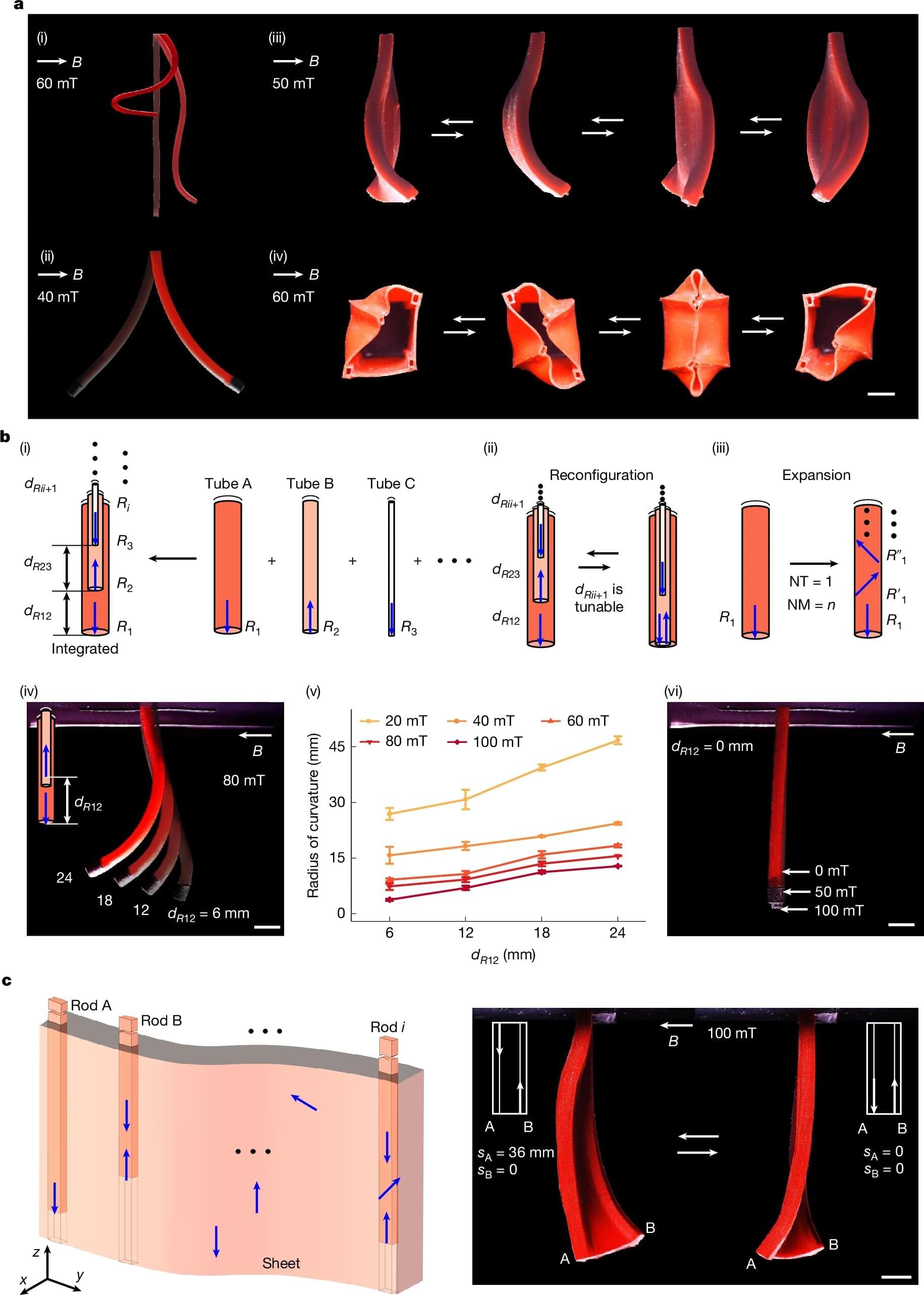
Led by Prof. Dr. Metin Sitti in the Physical Intelligence (PI) Department at MPI-IS in collaboration with Koç University in Istanbul, Turkey, the team stacked several tubes inside each other like Matryoshka dolls.