Nvidia is impressed with the chip making capabilities of NVCell, its AI chip designer. The firm says that it using it, just two GPUs can do nearly the same work that takes ten people a year’s time.
Nvidia is impressed with the chip making capabilities of NVCell, its AI chip designer. The firm says that it using it, just two GPUs can do nearly the same work that takes ten people a year’s time.

AI brings many benefits but as with any rapidly advancing technology it needs ethical frameworks that protect society, in particular children and young people.

This is not true. Earth could maintain a population many times the current level. The birth rate has been dropping like crazy. — @elonmusk

And if bacteria causes one kind, whos to say it doesnt cause every other kind.
Genetic information on the microbes has already allowed the scientists to piece together how they may behave in the body, including what toxins and other substances they might release. This has led them to develop half a dozen hypotheses around how the bugs could cause prostate cancer.
“We currently have no way of reliably identifying aggressive prostate cancers, and this research could help make sure men get the right treatment for them,” Luxton added.
“If the team can demonstrate that these newly identified bacteria can not only predict, but actually cause aggressive prostate cancer, for the first time we may actually be able to prevent prostate cancer occurring. This would be a huge breakthrough that could save thousands of lives each year.”
It would be very problematic if I was consuming billions of dollars a year in personal consumption, but that is not the case. In fact, I don’t even own a home right now. I’m literally staying at friends’ places.
![]()
Built upon the ubiquitous Fourier transform, the mathematical tools known as wavelets allow unprecedented analysis and understanding of continuous signals.
Posted in employment, food, robotics/AI

The processing of food at high volumes has traditionally posed many problems for robots and cobots, and has lagged behind other industries. Foods have a variety of shapes and sizes and can be delicate in nature. These variables can be challenging when a robot tries to grasp an item. The delicate often has strict requirements for quality, making them even harder to grasp (think: strawberries).
Non-automotive robot orders now represent 58% of the North American total. Unit sales to the food and consumer goods sector alone increased 29% in 2021 over 2020, according to Association for Advancing Automation (A3).
“More industries recognized that robotics could help reverse productivity declines and fill repetitive jobs human workers don’t want. It is no longer a choice whether to deploy robots and automation,” says Jeff Burnstein, president of A3. “It’s now an absolute imperative. As we’ve long believed—and users continue to confirm—robots help companies compete, ultimately creating more jobs to handle their growth.”

After a decade of meteoric growth that shook Hollywood to its core, Netflix Inc. has run into a wall.
Losing customers for the first time in a decade, Netflix Inc. is throwing out all of its old rules.
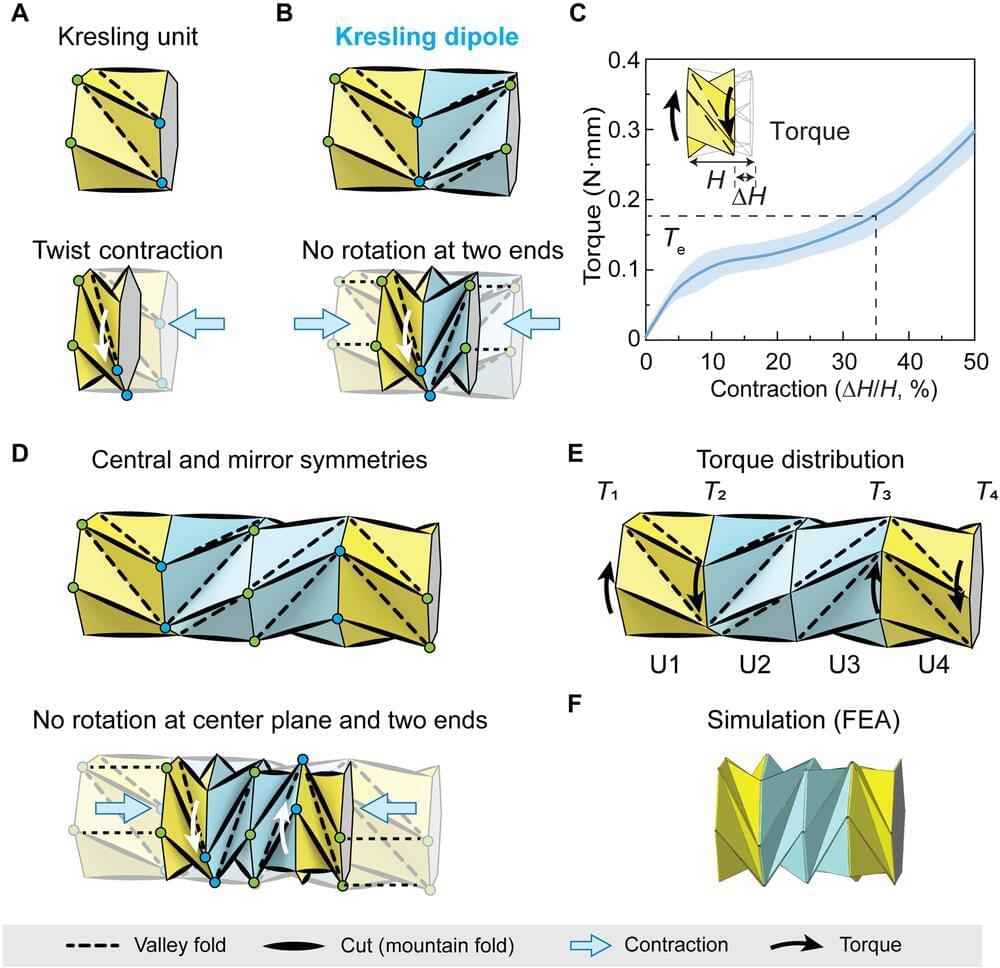
Materials scientists aim to develop biomimetic soft robotic crawlers including earthworm-like and inchworm-like crawlers to realize locomotion via in-plane and out-of-plane contractions for a variety of engineering applications. While such devices can show effective motion in confined spaces, it is challenging to miniaturize the concept due to complex and limited actuation. In a new report now published in Science Advances, Qiji Ze and a team of scientists in mechanical engineering and aerospace engineering at Stanford University and the Ohio State University, U.S., described a magnetically actuated, small-scale origami crawler exhibiting in-plane contraction. The team achieved contraction mechanisms via a four-unit Kresling origami assembly to facilitate the motion of an untethered robot with crawling or steering capacity. The crawler overcame large resistances in severely confined spaces due to its magnetically tunable structural stiffness and anisotropy. The setup provided a contraption for drug storage and release with potential to serve as a minimally invasive device in biomedicine.
Navigating complicated terrains
Bioinspired crawling motion shows adaptation to complicated terrains due to its soft deformable dimensions. Researchers aim to engineer crawling for a variety of applications in limited or confined environments, including extraterrestrial exploration, tube inspection, and gastrointestinal endoscopy. Origami provides an appropriate method to generate contraction relative to structural folding, which can be adapted to engineer robotic crawlers. The team described Kresling patterns; a specific type of bioinspired, origami pattern used to generate axial contraction under torque or compressive force, coupled with a twist from the relative rotation of the device units. Ze et al illustrated a magnetically actuated small-scale origami crawler to induce effective in-plane crawling motions. The scientists developed a four-unit Kresling assembly and verified torque distribution on the crawler using finite element analysis to induce motion.

