For the first time, scientists have generated a functional neural pathway for sensing pain in a dish. This could help unravel mechanisms of pain disorders.
For the first time, scientists have generated a functional neural pathway for sensing pain in a dish. This could help unravel mechanisms of pain disorders.
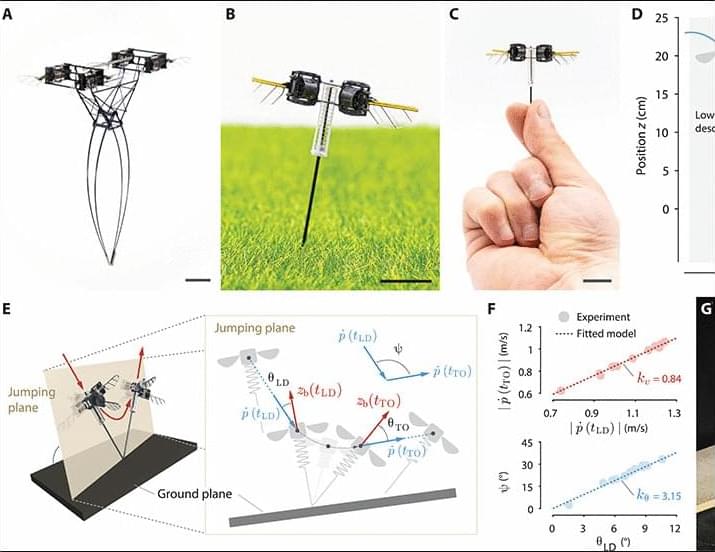
Jumping is ubiquitous among insects because it offers high locomotion versatility with moderate efficiency. Most jumping insects leverage latch-mediated spring actuation (14) principles to store and impulsively release energy—leading to high jumps that exceed 0.7 m or 115 times their body length (15). Subgram jumping robots (16, 17) adopt a similar design where they can reach up to 0.64-m jump height. However, unlike insects, small robots lack the ability to control attitude and landing position while they are aloft, and they cannot reorient themselves and reload the jumping mechanism after landing. Achieving the ability to perform consecutive jumps can substantially improve microrobot mobility. Hopping, or continuous jumping, has been achieved in mesoscale (35 to 100 g) robots (18–20) to demonstrate efficient and versatile locomotion. Unlike single-jump robots (21, 22) that slowly store energy in a spring-latched system, hopping robots (18, 23) need to quickly store energy in series-elastic mechanisms during the aerial phase and release energy during the stance phase. Most hopping designs are based on the spring-loaded inverted pendulum model (24), and the mechanisms are realized on the basis of a combination of multiple linkages and springs (18–20).
However, these mesoscale designs are difficult to implement in insect-scale robots owing to scaling laws, fabrication, and control challenges. As robot size shrinks, robot dynamics become substantially faster, requiring rapid actuation and control in the range of tens of milliseconds. For a subgram robot to hop, the duration of ground contact becomes shorter than 20 ms, exceeding the control bandwidth of microscale actuators. The short ground impact can also cause large body torques and induce fast rotations, which require another set of actuators and mechanisms to stabilize robot’s attitude in the aerial phase. In addition, it becomes increasingly difficult to construct nonlinear springs, flexures, and linkages at the submillimeter scale. Owing to these challenges, existing insect-scale robots have not achieved hopping despite the potential advantages of versatility and efficiency. At the tens-of-gram scale, our prior work presented a different hopping design by adding a passive telescopic leg to a quadcopter, resulting in a 35-g Hopcopter (20). This Hopcopter demonstrated better controllability and efficiency over other existing designs because it could inject energy and exert stronger attitude control in the aerial phase. Applying this design to insect-scale systems is advantageous because it reduces mechanical complexity. However, new challenges arise because of diminishing robot inertia and substantially faster system dynamics that require fast planning and attitude control. Specifically, high-bandwidth actuators and computationally efficient controllers are needed to replace electromagnetic motors and model-based collision planners (20).
In this work, we demonstrate efficient, versatile, and robust hopping in subgram robots by augmenting a micro–aerial vehicle with a passive elastic leg (Fig. 1, A to C Opens in image viewer, and movie S1). Compared to flight, this hopping design reduces energetic cost by 64% and increases the robot’s payload by over 10 times. The robot can precisely control its jump height, frequency, and landing positions to track set points and leap over large obstacles. This hopping design is also adaptive to a wide range of slippery, uneven, rough, or deformable terrains, including wood, glass, ice, soil, grass, and a floating lotus leaf. Owing to fast robot dynamics and the ability to generate large body torques, the robot further demonstrates unparalleled robustness and agility among microrobots. The robot can hop on dynamically inclined surfaces, recover from strong in-air collisions, and perform acrobatic flips in its aerial phase. In addition, diminishing inertial effects enable challenging locomotive tasks that are infeasible for larger-scale robots. Our robot can jump onto a 29-g quadrotor, which shows that impulsive interaction between two heterogeneous aerial robots can enhance mobility. These demonstrations highlight the unique advantages of insect-scale hopping. Our results also have implications on achieving sensing and power autonomy in payload-constrained microrobots that often confront large obstacles. Compared to insect-scale aerial vehicles, our robot retains the capability of overcoming large obstacles while substantially reducing power consumption and increasing payload. The 10 times payload increase opens opportunities for incorporating onboard sensors, electronics, and power sources.
![]()
On TikTok there are exceptional “testimonials” like Nikola Tesla or Marie Curie delivering short science-related messages that have garnered millions of views. This is just one of many examples where AI-generated avatars are used to communicate science—a strategy that might also have its drawbacks.
The generation of images and animations through artificial intelligence is a rapidly growing field, constantly improving in quality. Yet many avatars, though realistic, still present minor flaws—glitches, delays, inconsistent facial expressions or lip-syncing—sometimes barely noticeable, but still easily picked up by a human observer.
Jasmin Baake, researcher at the Center for Advanced Internet Studies (CAIS), Bochum, Germany, and the other authors of a study in the Journal of Science Communication realized that these avatars could trigger a phenomenon known in cognitive science as the “uncanny valley.”
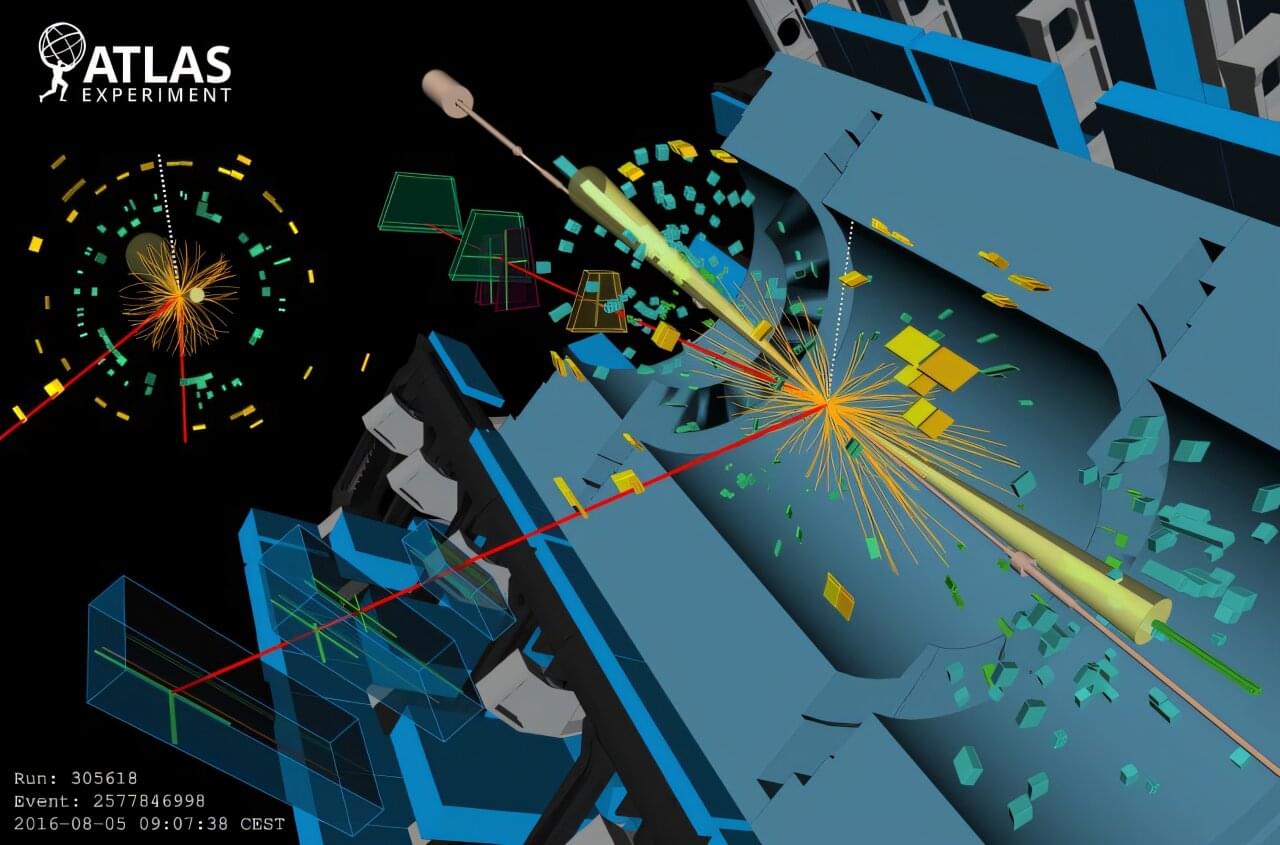
The detection of longitudinally polarized W boson production at the Large Hadron Collider is an important step towards understanding how the primordial electroweak symmetry broke, giving rise to the masses of elementary particles.
In 2012, the discovery of the Higgs boson by the ATLAS and CMS collaborations at CERN opened a new window on the innermost workings of the universe. It revealed the existence of a mysterious, ancient field with which elementary particles interact to acquire their all-important masses.
This process is governed by a delicate mechanism called electroweak symmetry breaking, which was first proposed in 1964 but remains among the least understood phenomena of the Standard Model of particle physics. To probe this critical mechanism in the evolution of the universe, physicists require a very large dataset of high-energy particle collisions.
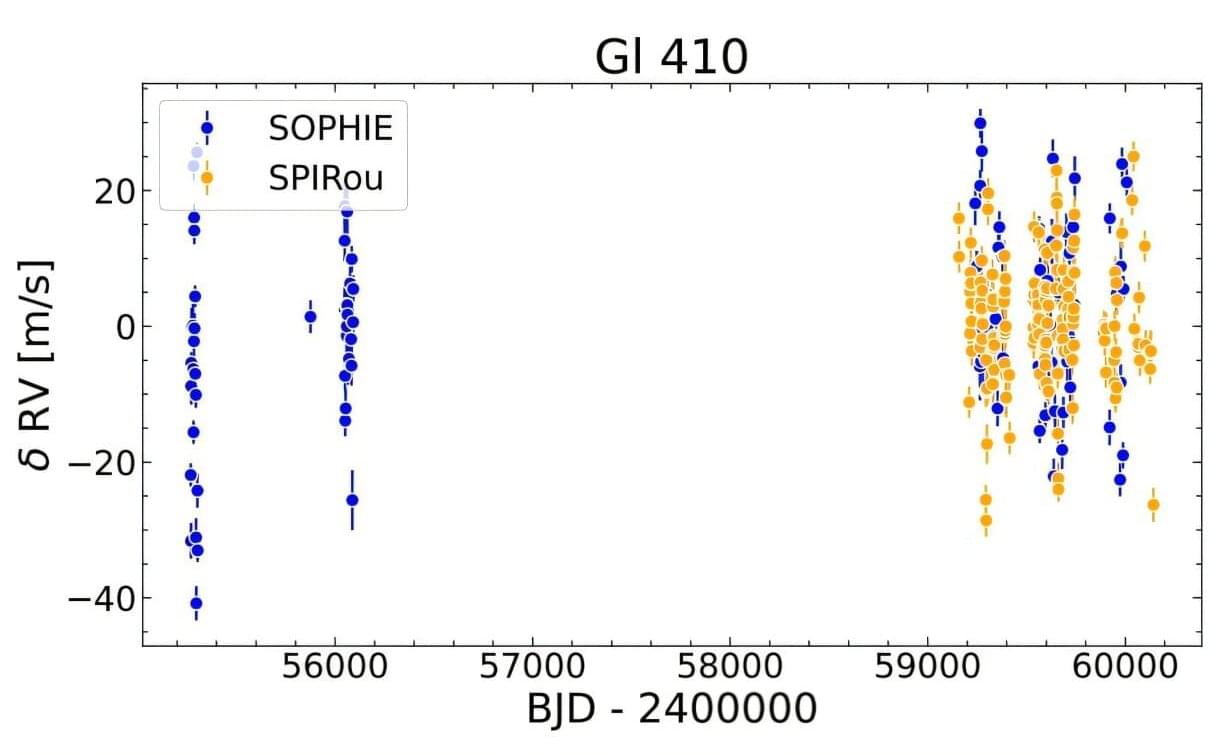
Using the radial velocity method, an international team of astronomers has discovered a new extrasolar planet orbiting a nearby star known as GI 410. The newfound alien world was classified as a sub-Neptune exoplanet with a mass of at least 8.4 Earth masses. The discovery was reported April 4 on the pre-print server arXiv.
The radial velocity (RV) method of detecting an exoplanet is based on the detection of variations in the velocity of the central star, due to the changing direction of the gravitational pull from an unseen exoplanet as it orbits the star. Thanks to this technique, more than 600 exoplanets have been detected so far.
Now, a group of astronomers led by Andres Carmona of the Grenoble Alpes University in France reports another exoplanet detection using the RV technique. The discovery was made with the SPIRou near-infrared spectropolarimeter at the Canada–France–Hawaii Telescope (CFHT). The observations were complemented by data from the optical velocimeter SOPHIE at the Haute-Provence Observatory.
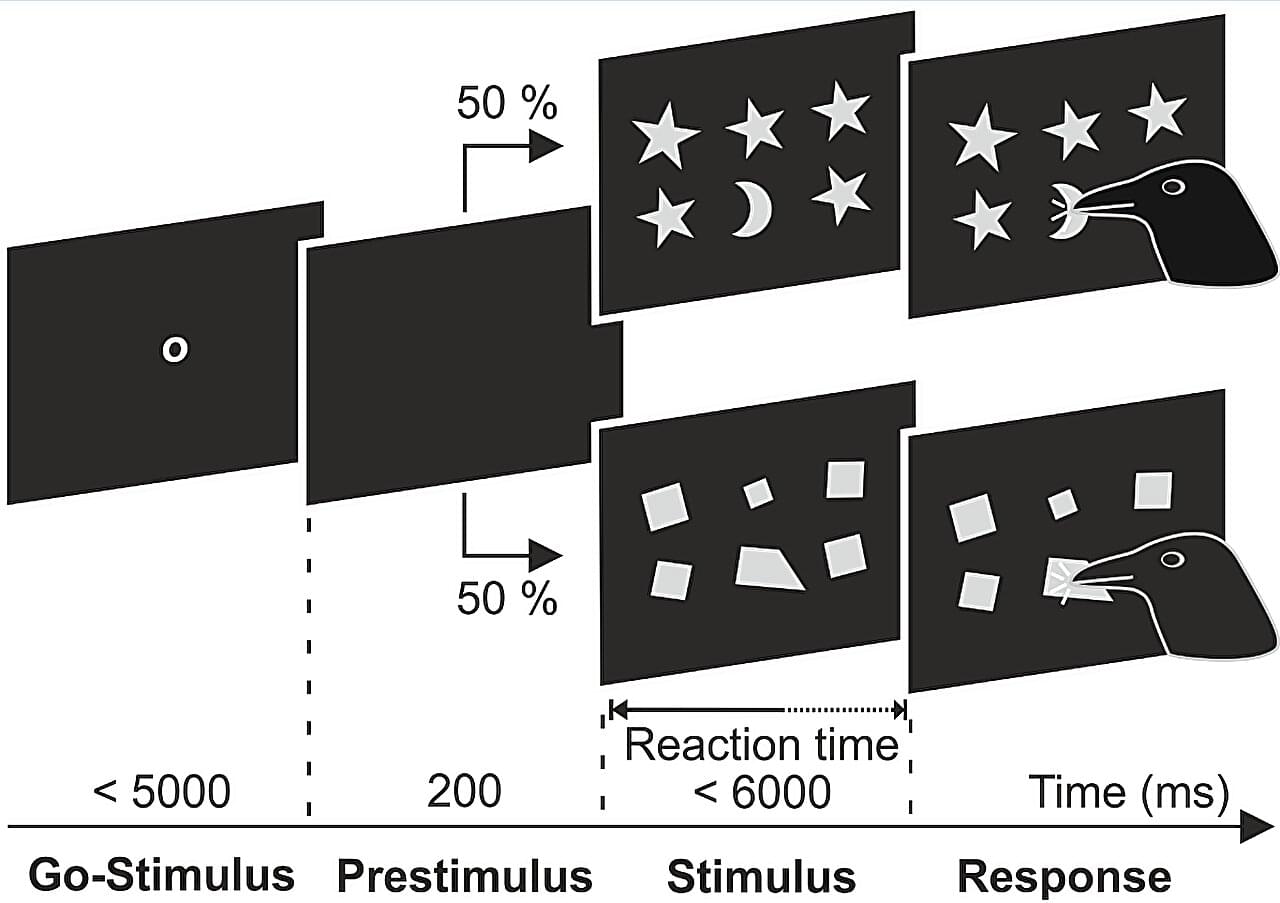
A trio of animal physiologists at the University of Tübingen, in Germany, has found that at least one species of crow has the ability to recognize geometric regularity. In their study published in the journal Science Advances, Philipp Schmidbauer, Madita Hahn and Andreas Nieder conducted several experiments that involved testing crows on their ability to recognize geometric shapes.
Recognizing regularity in geometric shapes means being able to pick out one shape that is different from others in a group—picking out a plastic star, for example, when it is placed among several plastic moons. Testing for the ability to recognize geometric regularity has been done with many animals, including chimps and bonobos. Until now, this ability has never been observed in any creature except for humans.
Because of that, the team started with a bit of skepticism when they began testing carrion crows. In their work, the testing was done using computer screens—the birds were asked to peck the outlier in a group; if they chose correctly, they got a food treat. The team chose to test carrion crows because prior experiments have shown them to have exceptional intelligence and mathematical capabilities.
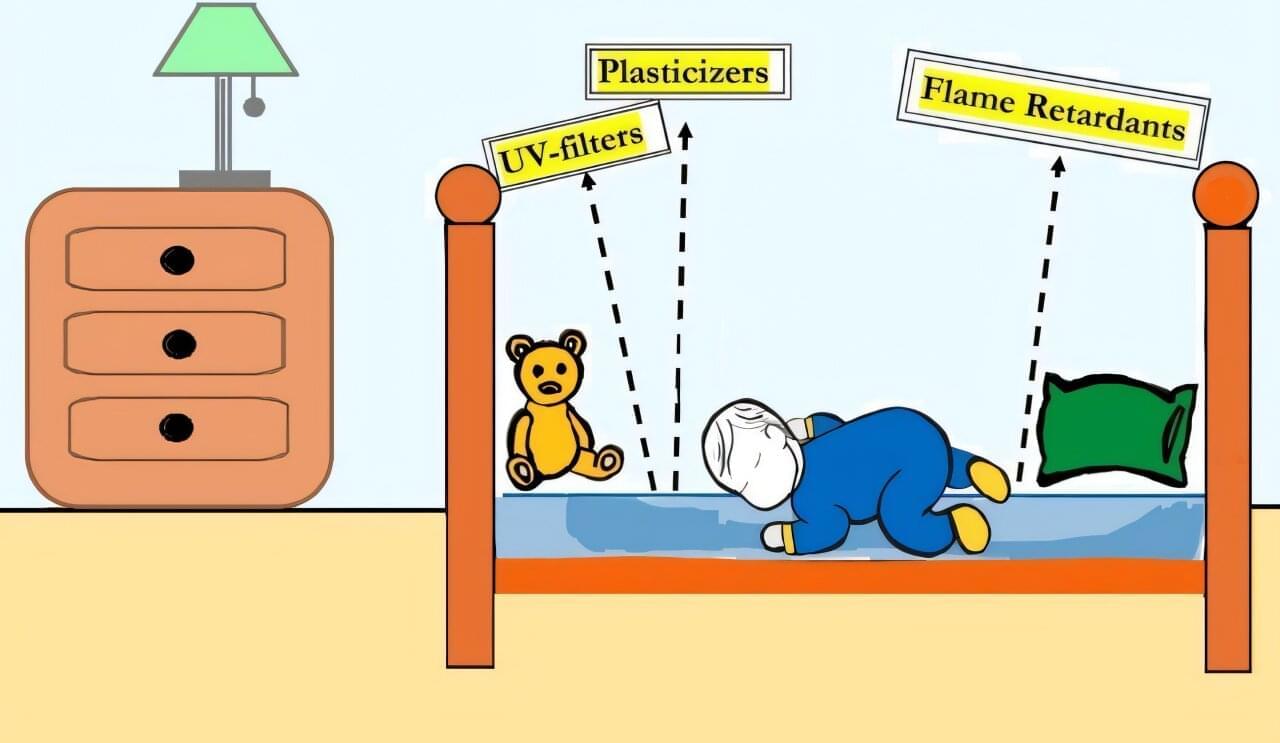
Babies and young children may breathe and absorb plasticizers called phthalates, flame retardants, and other harmful chemicals from their mattresses while they sleep, according to a pair of studies published by the University of Toronto in Environmental Science & Technology and Environmental Science & Technology Letters. These chemicals are linked to neurological and reproductive problems, asthma, hormone disruption, and cancer.
“Sleep is vital for brain development, particularly for infants and toddlers. However, our research suggests that many mattresses contain chemicals that can harm kids’ brains,” says senior author Miriam Diamond, professor at the University of Toronto.
“This is a wake-up call for manufacturers and policymakers to ensure our children’s beds are safe and support healthy brain development.”
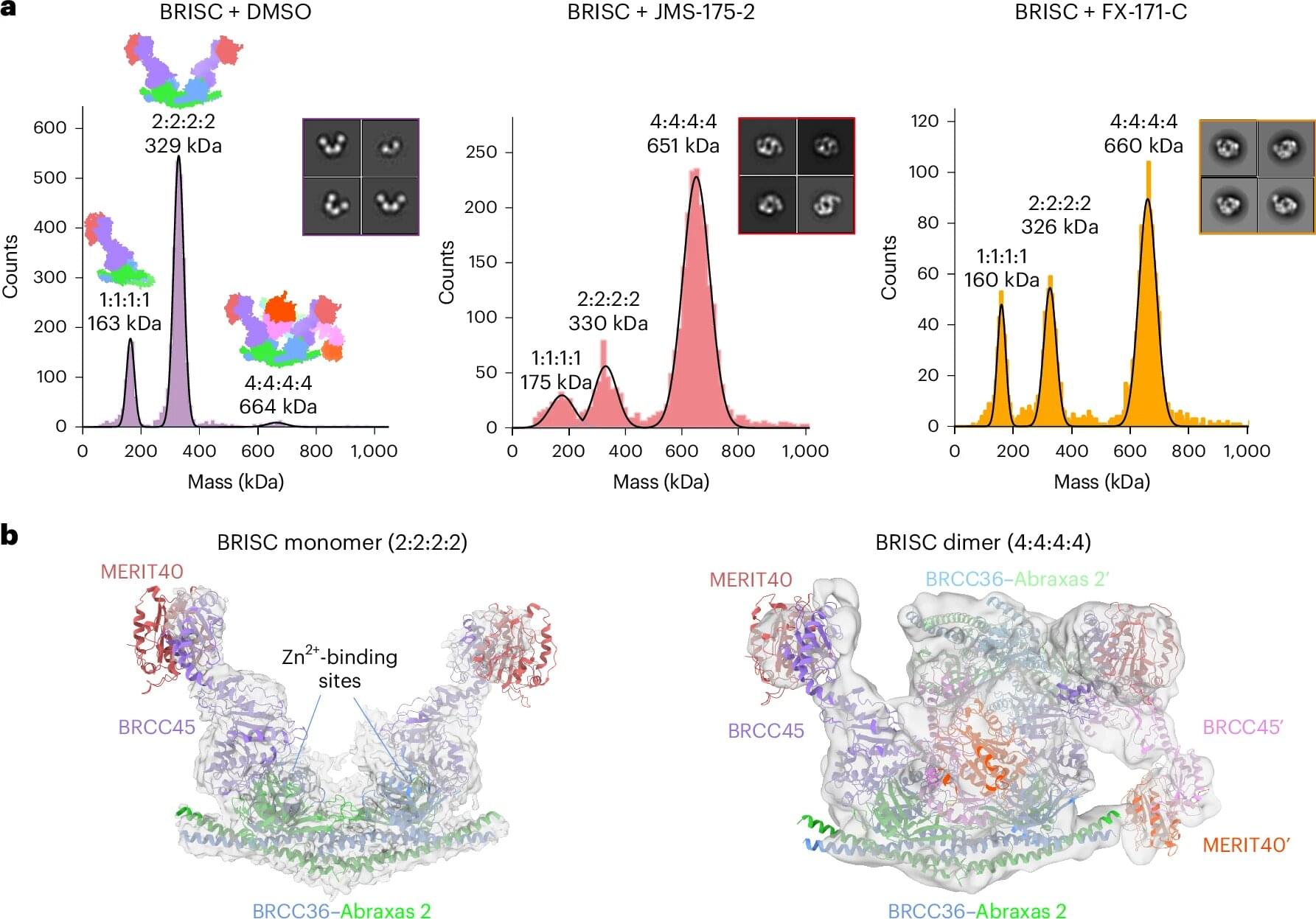
Researchers have discovered a type of “molecular glue” that can be used to inhibit certain pathological protein interactions. Their findings were published in the paper, “Molecular glues that inhibit deubiquitylase activity and inflammatory signaling,” in Nature Structural & Molecular Biology.
The Wistar Institute’s Joseph Salvino, Ph.D.—in collaboration with Elton Zeqiraj, Ph.D., of The University of Leeds and Roger Greenberg, M.D., Ph.D., of The Perelman School of Medicine at the University of Pennsylvania—led the study.
“Molecular glues are an exciting new area of research that allows us to fight disease by working with the body’s systems rather than against them,” said Dr. Salvino. “By gluing together an inactive form of the BRISC complex with our system, we’re able to reduce the continuous inflammatory signaling due to dysregulated BRISC complex activity in autoimmune diseases.”

Imagine waking up thirsty at night and having to reach for a glass of water in the dark. Without a clear view, your brain has to estimate where the glass is and where your hand is—a challenge that often leads to imprecise movements. The brain processes two key pieces of information: It needs to know where the hand is and where to move it. But what happens if this information is inaccurate?
Scientists from the Sensorimotor Research Group at the DPZ have investigated this problem of visual uncertainty during movement control in a study with rhesus monkeys. The research is published in the journal Nature Communications.
In the experiment, the monkeys moved a cursor on a screen by hand, using a kind of joystick. Two types of uncertainty were investigated. In target uncertainty, the target of the movement was represented by several scattered objects, so that it remained unclear where exactly the target was located. In the case of feedback uncertainty, the cursor was replaced by several scattered, small objects so that it remained unclear exactly where the user’s own hand was located.
