Flying manipulator robots have shown themselves to be useful in many applications, such as industrial maintenance or construction. Their utility in hard to reach or hazardous locations makes them particularly promising in applications that put humans at risk. While these machines have been continuously improving over the years, they are still lacking in certain areas.
One difficulty for drones in the past has been the ability to stack on top of one another and work cooperatively while in flight. This ability is useful for things like swapping tools, similar to the way a nurse might hand different tools to a doctor during a procedure—allowing the doctor (or manipulator drone) to work uninterrupted.
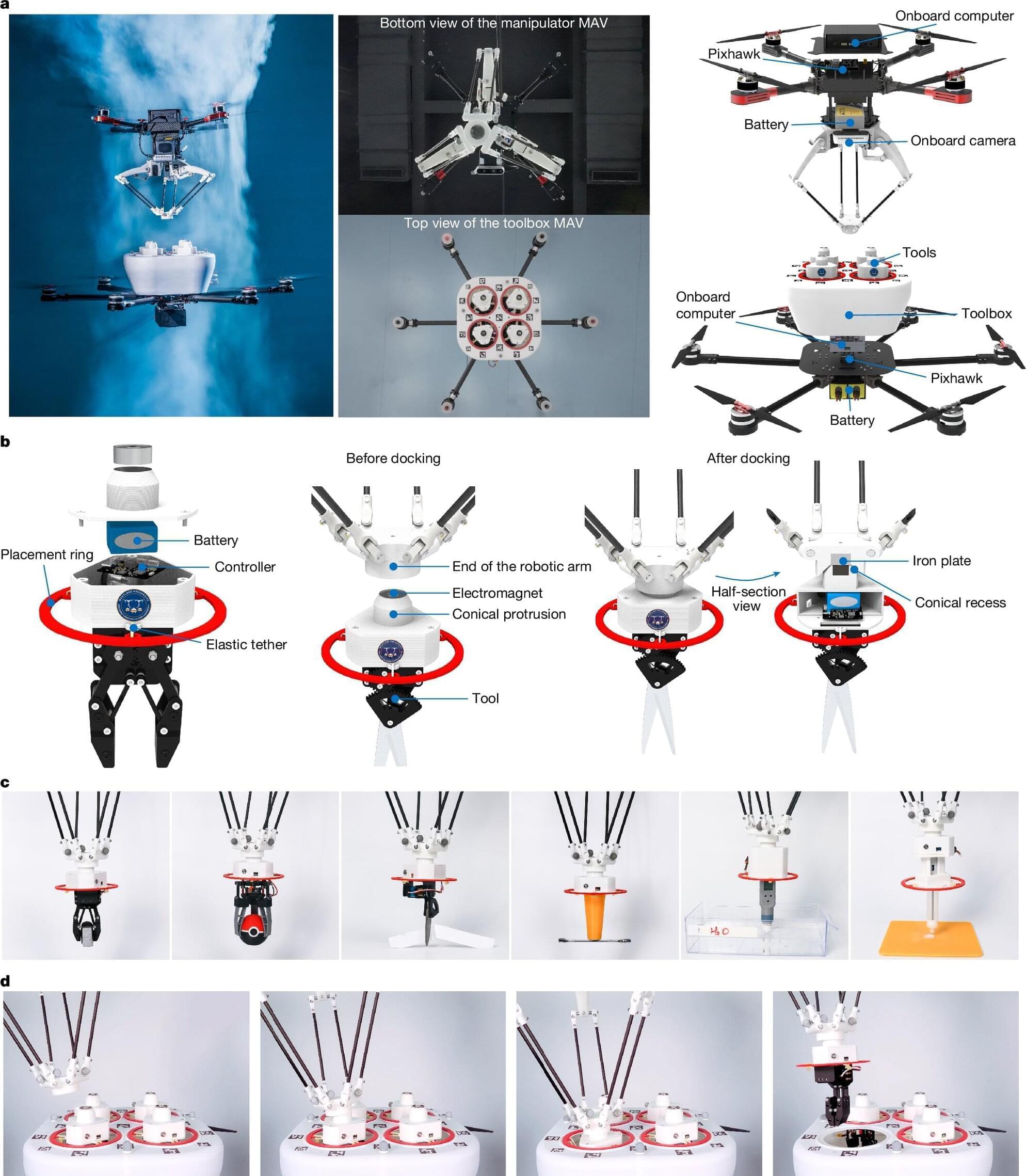
The difficulty comes from something called “downwash,” which is a strong movement of air generated between two drones that interferes with their precise movements and docking procedures. However, a team of researchers from Westlake University in China has designed a new system of micro-aerial vehicles (MAVs) capable of exchanging tools with impressive precision while flying. The design and experimental tests on the “FlyingToolbox” are documented in their new study, published in Nature.