A 2D version of a half-metal—a spin-selective electrical conductor—could aid spin-based electronics.
A proposed experiment could shed light on the unknown interplay of quantum theory and general relativity.
Quantum theory has been remarkably successful ever since its inception 100 years ago. And yet, there is a glaring mismatch between the discrete, quantum nature of matter and the apparent continuous, classical nature of spacetime, in which matter resides and interacts. This disparity raises profound questions. Does spacetime have indivisible units, or quanta, even though it does not seem to be divisible like matter [1, 2]? And if so, do these quanta have observable signatures, and do they influence other areas of physics? Now Jacob Covey at the University of Illinois Urbana-Champaign and his colleagues have proposed a way to address these questions [3]. Their strategy involves using a widely distributed quantum state to probe the essential features of quantum theory in the curved spacetime of Earth’s gravitational field.
The team’s proposal is relevant to the problem of quantum gravity—that is, how to coherently and logically combine quantum theory and the general theory of relativity [4]. Many researchers consider this problem to be one of the greatest unsolved puzzles in physics (although some still think that gravity should not be quantized and that the whole concept of quantum gravity might be fundamentally misguided [5]). But compared with other thriving areas of quantum theory and its manifold applications, quantum gravity remains an almost entirely theoretical enterprise that is pursued through string theory, loop quantum gravity, and many other approaches [4]. It is thus inherently nonempirical and speculative, constrained only by our current knowledge of quantum theory and general relativity.
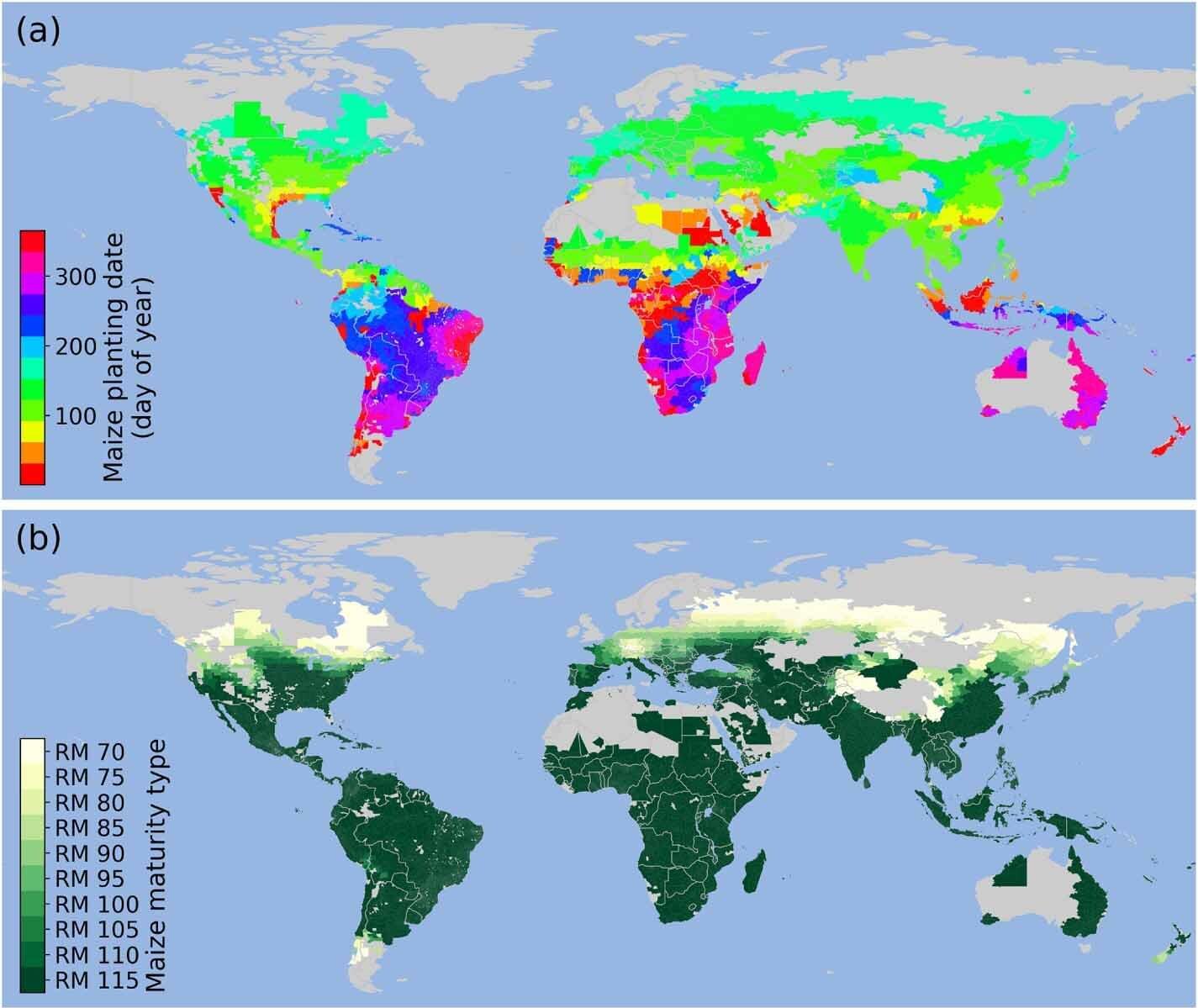
A nuclear winter is a theoretical concept, but if the climate scenario expected to follow a large-scale nuclear war, in which smoke and soot from firestorms block sunlight, came to fruition, global temperatures would sharply drop, extinguishing most agriculture. A nuclear winter could last for more than a decade, potentially leading to widespread famine for those who survive the devastation of the bomb blasts.
Now, a team led by researchers at Penn State have modeled precisely how various nuclear winter scenarios could impact global production of corn—the most widely planted grain crop in the world. They also recommended preparing “agricultural resilience kits” with seeds for faster-growing varieties better adapted to colder temperatures that could potentially help offset the impact of nuclear winter, as well as natural disasters like volcanic eruptions.
In findings recently published in Environmental Research Letters, the team reported that the level of corn crop decline would vary, depending on the scale of the conflict.
Betelgeuse is one of the brightest stars in the night sky, and the closest red supergiant to Earth. It has an enormous volume, spanning a radius around 700 times that of the sun. Despite only being ten million years old, which is considered young by astronomy standards, it’s late in its life.
Located in the shoulder of the constellation Orion, people have observed Betelgeuse with the naked eye for millennia, noticing that the star changes in brightness over time. Astronomers established that Betelgeuse has a main period of variability of around 400 days and a more extended secondary period of around six years.
In 2019 and 2020, there was a steep decrease in Betelgeuse’s brightness—an event referred to as the “Great Dimming.” The event led some to believe that a supernova death was quickly approaching, but scientists were able to determine the dimming was actually caused by a large cloud of dust ejected from Betelgeuse.
It took about 50 exploding stars to upend cosmology. Researchers mapped and measured light from Type Ia supernovae, the dramatic explosion of a particular kind of white dwarf. In 1998, they announced their surprising results: Instead of slowing down or staying constant, our universe was expanding faster and faster. The discovery of “dark energy,” the unknown ingredient driving the accelerated expansion, was awarded a Nobel Prize.
Since the late ’90s, dozens of experiments using different telescopes and techniques have captured and published more than 2,000 Type Ia (pronounced “one A”) supernovae. But without correcting for those differences, using supernovae from separate experiments is often a case of comparing apples and oranges.
To unite the supernovae and more precisely measure dark energy’s role in our universe, scientists built the largest standardized dataset of Type Ia supernovae ever made. The compilation is called Union3 and was built by the international Supernova Cosmology Project (SCP), which is led by the Department of Energy’s Lawrence Berkeley National Laboratory (Berkeley Lab).
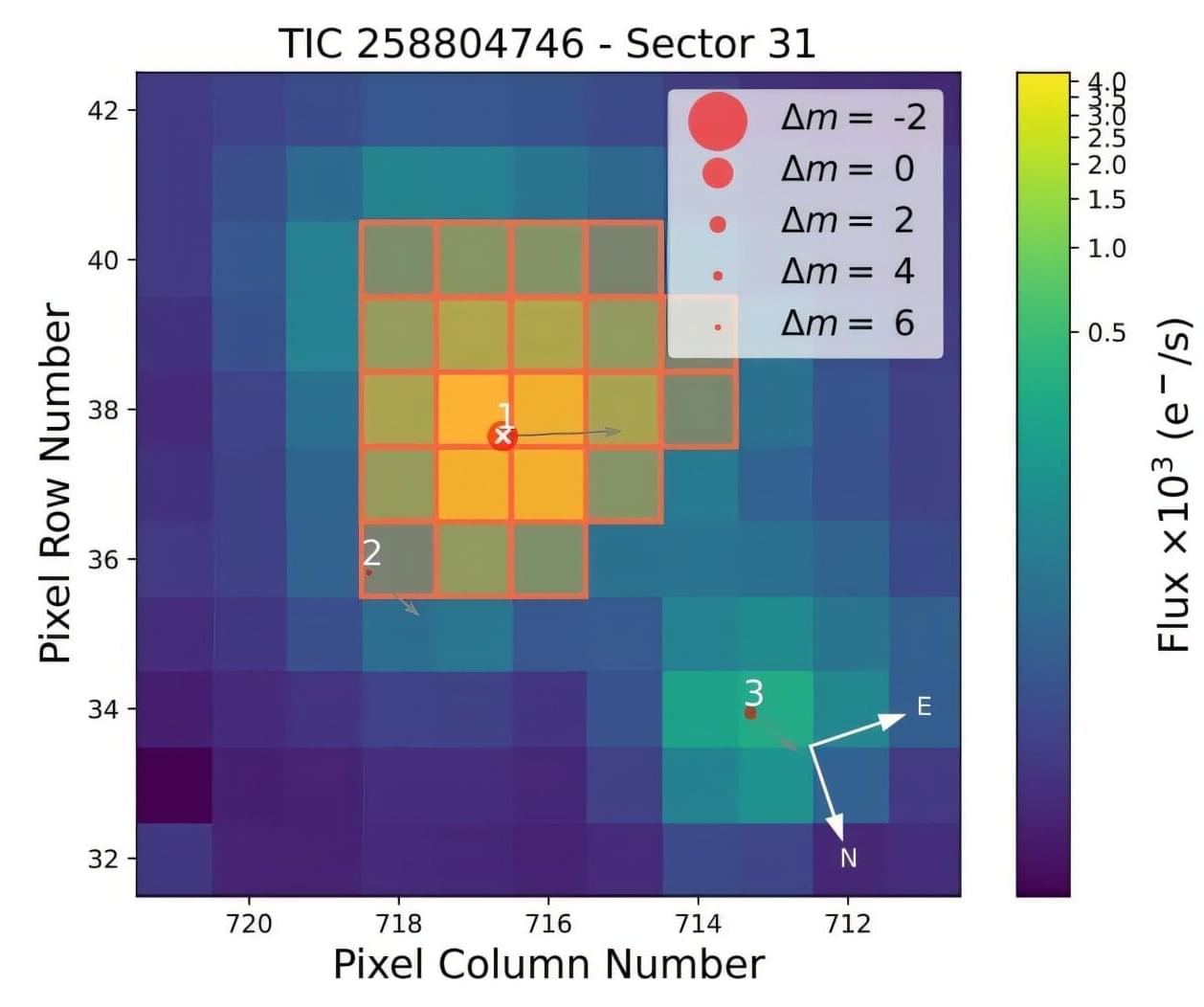
Using the Transiting Exoplanet Survey Satellite (TESS), an international team of astronomers has detected a new exoplanet orbiting a nearby star. The newfound alien world, designated TOI-2431 b, is comparable in size to Earth and has a very short orbital period. The finding was reported in a research paper published July 11 on the pre-print server arXiv.
NASA’s TESS monitors about 200,000 bright stars near Earth, looking for temporary drops in brightness caused by planetary transits. Since its launch in April 2018, the satellite has identified more than 7,600 candidate exoplanets (TESS Objects of Interest, or TOI), of which 638 have been confirmed so far.
Now, a team of astronomers led by Kaya Han Taş of the University of Amsterdam in the Netherlands, reports the confirmation of another TOI monitored by TESS. According to the paper, a transit signal has been detected in the light curve of TOI-2431—a star of spectral type KV7 located some 117 light years away. The planetary nature of this signal was confirmed by follow-up ground-based observations.
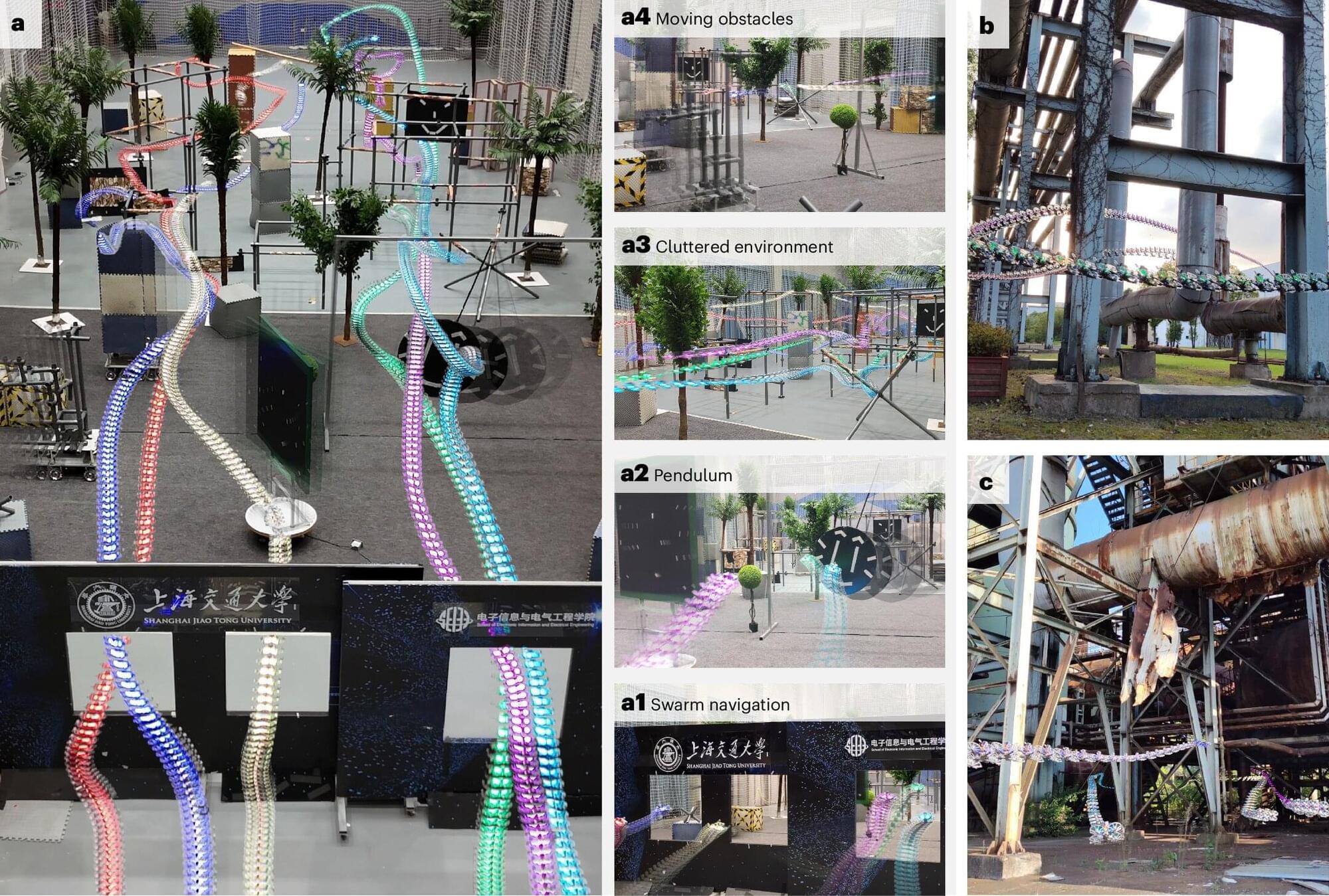
Unmanned aerial vehicles (UAVs), commonly known as drones, are now widely used worldwide to tackle various real-world tasks, including filming videos for various purposes, monitoring crops or other environments from above, assessing disaster zones, and conducting military operations. Despite their widespread use, most existing drones either need to be fully or partly operated by human agents.
In addition, many drones are unable to navigate cluttered, crowded or unknown environments without colliding with nearby objects. Those that can navigate these environments typically rely on expensive or bulky components, such as advanced sensors, graphics processing units (GPUs) or wireless communication systems.
Researchers at Shanghai Jiao Tong University have recently introduced a new insect-inspired approach that could enable teams of multiple drones to autonomously navigate complex environments while moving at high speed. Their proposed approach, introduced in a paper published in Nature Machine Intelligence, relies on both a deep learning algorithm and core physics principles.
When thinking about future events, optimists’ brains work similarly, while pessimists’ brains show a much larger degree of individuality. The Kobe University finding offers an explanation why optimists are seen as more sociable—they may share a common vision of the future.
Optimists tend to be more satisfied with their social relationships and have wider social networks. Kobe University psychologist Yanagisawa Kuniaki says, “But what is the reason for this? Recent studies showed that the brains of people who occupy central social positions react to stimuli in similar ways. So it may be that people who share a similar attitude toward the future, too, truly envision it similarly in their brains and that this makes it easier for them to understand each other’s perspectives.”
To test this hypothesis, Yanagisawa assembled an interdisciplinary team from both the fields of social psychology and cognitive neuroscience. “The main reason why this question has remained untouched until now is that it exists in a gap between social psychology and neuroscience. However, the intersection of these two fields enabled us to open this black box.”
{kind=link}