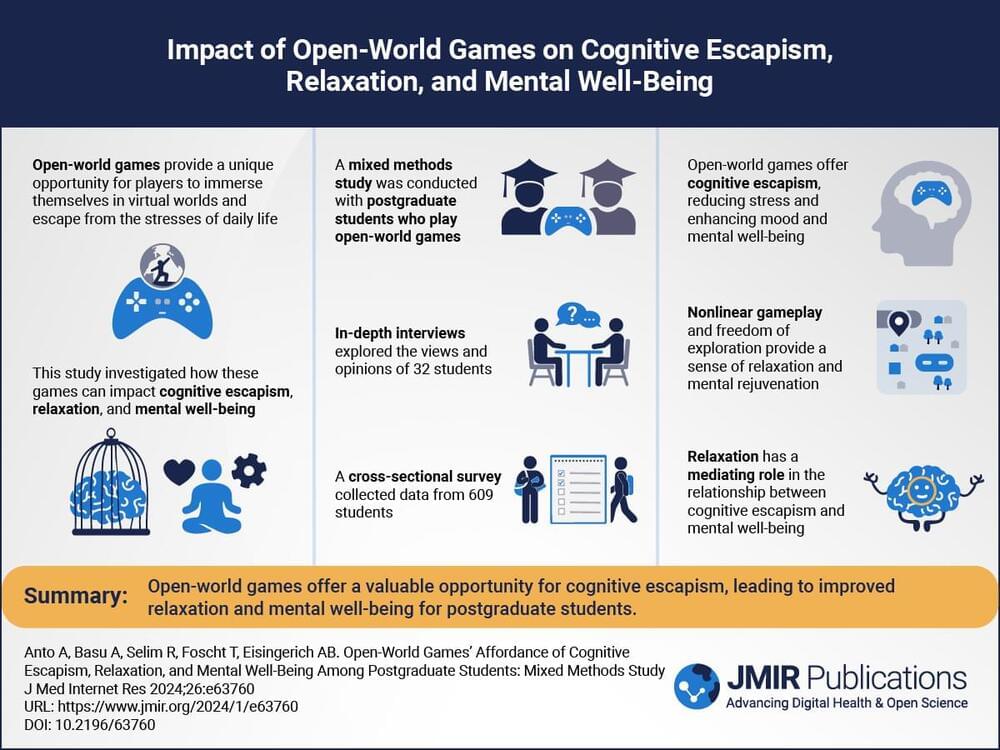
Background: Open-world games, characterized by their expansive and interactive environments, may offer unique cognitive escapism opportunities, potentially leading to relaxation and enhanced well-being. These games, such as “The Legend of Zelda: Breath of the Wild” and “The Legend of Zelda: Tears of the Kingdom,” allow players to experience a sense of freedom and autonomy, which can reduce stress and improve mental health. While previous research has examined the general impact of video games on mental well-being, specific studies on the effects of open-world games among postgraduate students are limited.
Objective: This study aims to investigate the relationships between cognitive escapism provided by open-world games and their effects on relaxation and well-being. The goal was to understand how the immersive nature of these games contributes to stress reduction and overall mental health improvement among postgraduate students.
Methods: A mixed methods approach was used, which involved in-depth exploratory qualitative interviews and a survey of 609 players of popular open-world games. Quantitative data were collected using standardized questionnaires to measure open-world games’ affordance of cognitive escapism, relaxation, and well-being. Qualitative data were obtained through 32 in-depth interviews that explored players’ experiences and perceptions of cognitive escapism, relaxation, and mental well-being.