A hidden gut-brain protein may hold the key to stopping alcohol’s twin assault on the liver and the mind.


Stanford research reveals creators feel exhausted, depressed, and financially unstable due to constant pressure to post, algorithm unpredictability, and frequent “demonetization.” While rage bait may work short-term, it’s unsustainable. Creators eventually seek other revenue streams, only to be replaced by new outrage merchants.
Bottom line: Rage bait is a symptom of platforms’ engagement-based economic incentives—not an isolated phenomenon, but a “highly visible result” of the ecosystem social media companies have created.
“Rage bait” is Oxford’s Word of the Year. What makes anger so appealing?
Jeff Lutz is an ex Supply Chain C-Level Exec at several Fortune 100 companies like Google, Lenovo and Motorola. Currently running his own consulting firm.
Follow Jeff Lutz on X: @theJeffLutz.
Become a Patreon: / brighterwithherbert.
Become a YouTube Channel Member: / @brighterwithherbert.
Your support means alot! ❤️
My website: https://www.HerbertOng.com.
15+ modules of resources for the $TSLA Investor + free TESLA Milestone Tables.
Buying a Tesla? Use my referral link and get 3 months free FSD.
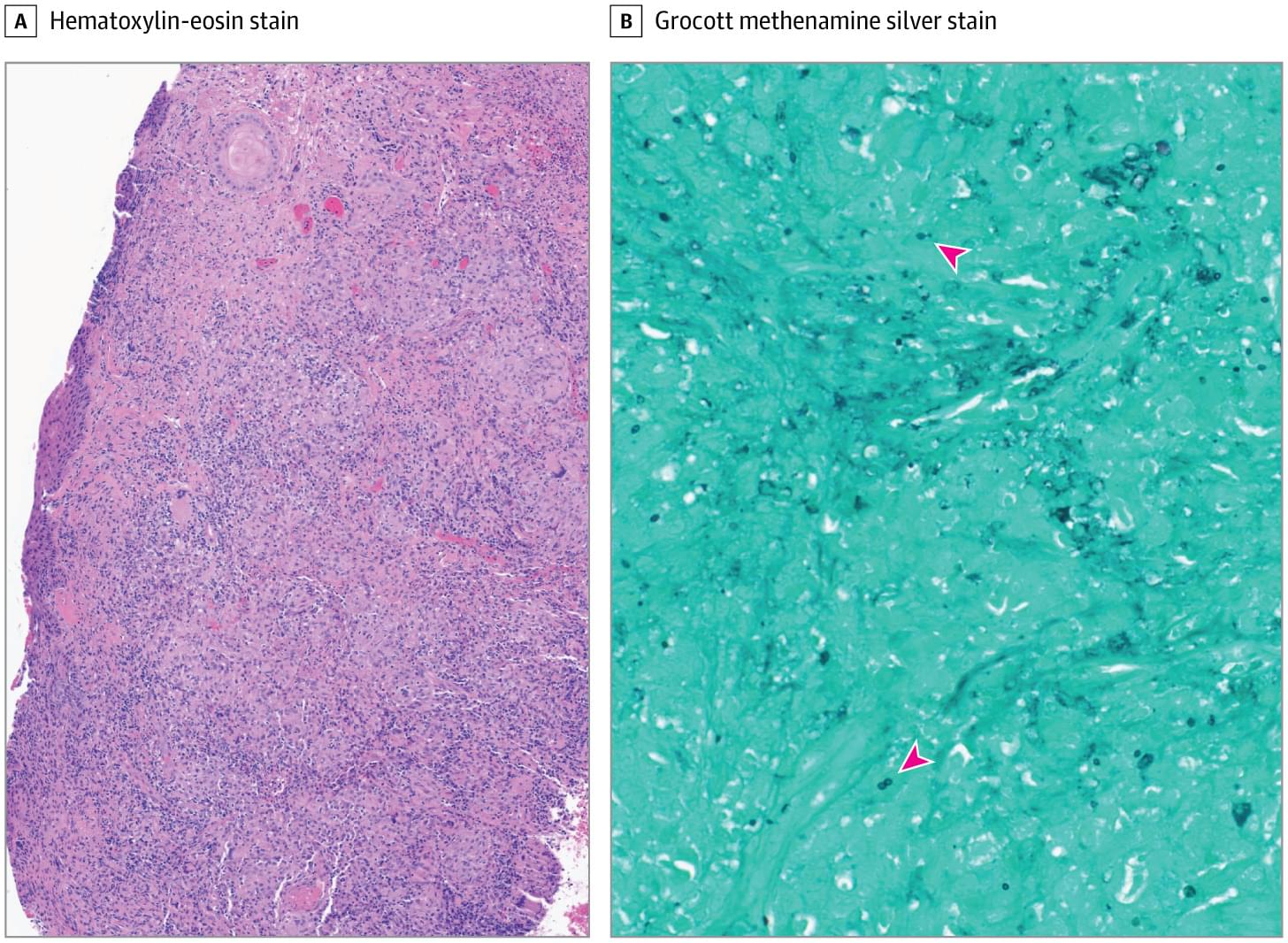
In a patient from a histoplasmosis-endemic region, laryngeal histoplasmosis caused by Histoplasma capsulatum was diagnosed after biopsy revealed granulomatous inflammation and fungal organisms.
Early consideration and biopsy are key when evaluating ulcerative laryngeal lesions.
A 61-year-old man presented to the otolaryngology clinic with a 2-month history of progressive hoarseness, dysphagia, odynophagia, and persistent globus sensation. What is your diagnosis?

As part of the ESA Academy Experiments Programme, Team V-STARS carried out the first experiment with human participants in the Orbital Robotics Lab, investigating how microgravity affects the perception of verticality.
The V-STARS team, a collaboration between Birkbeck, University of London, and the University of Kent (UK), was selected to join the ESA Academy Experiments Programme in February 2025. After obtaining ethical approval from the United Kingdom and authorisation from the ESA Medical Board, the team was permitted to carry out their experiment in the Orbital Robotics Lab (ORL), located at ESTEC, the ESA site in the Netherlands.
The campaign involved test subjects seated on the ORL’s floating platform, wearing VR headsets while performing gravity-related perceptual tasks. The project investigates the use of Vestibular Stochastic Resonance — a phenomenon in which controlled noise enhances the sensitivity of a sensory system — to improve perception and potentially accelerate adaptation to microgravity. Over two weeks, the team tested more than 20 participants and has now returned to their universities to analyse the results.
Canine induced pluripotent stem (iPS) cells possess the ability to differentiate into any type of cell, making them a useful tool for investigating common canine diseases and disease states, including those of humans.
When culturing iPS cells, a culture substrate is required to serve as a scaffold for the cells, which adhere to it and proliferate. Without the scaffold, the cells die or fail to differentiate.
Currently, recombinant proteins derived primarily from humans are used as culture substrates for canine iPS cells. However, these human-derived elements are an alien substance for dog cells, leading to immune rejection and making clinical use difficult.
Scientists have captured an unprecedented, real-time view of influenza viruses as they move across and slip inside human cells. The footage reveals that cells are far from passive targets and instead push and pull against the virus in a surprisingly active struggle. Viewing Influenza Infection W.