How can future lunar astronauts have power on a future lunar settlement without needing to have it delivered from Earth? This is what a recent study publis | Space
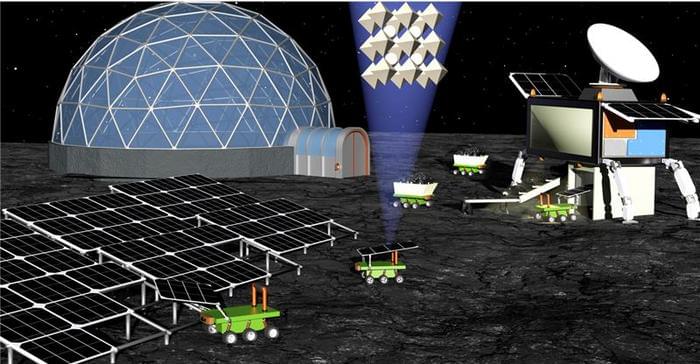
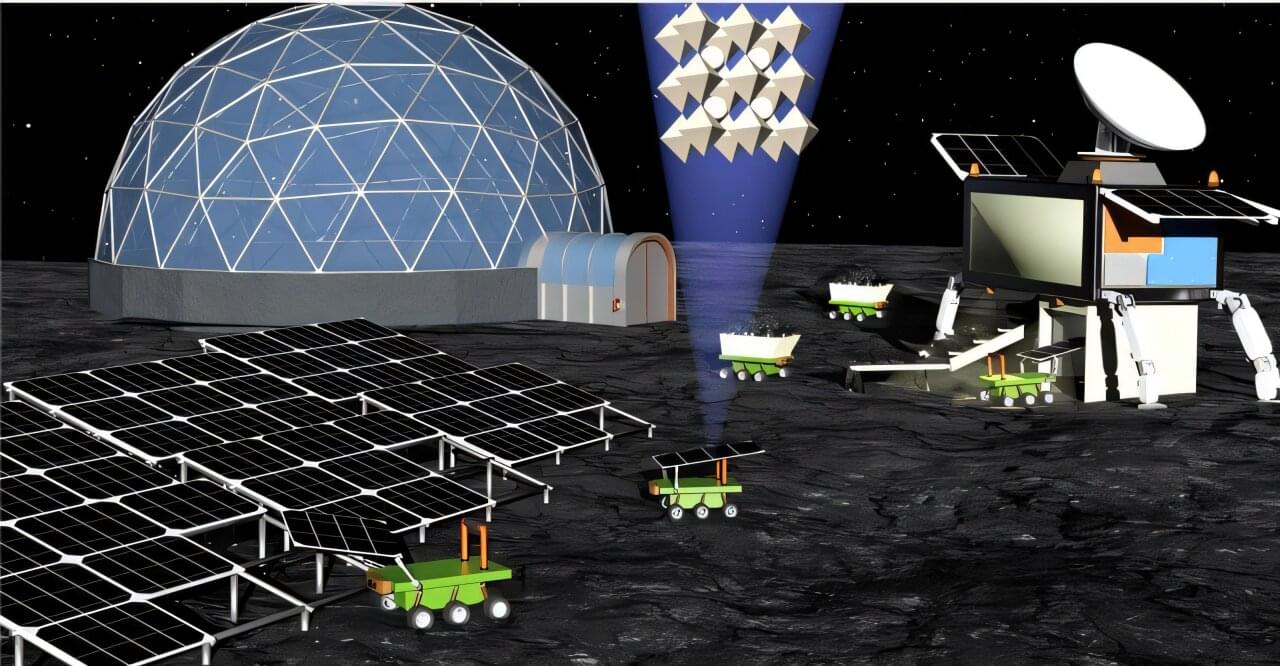
The same dirt that clings to astronauts’ boots may one day keep their lights on. In a study published in Device, researchers created solar cells made out of simulated moon dust. The cells convert sunlight into energy efficiently, withstand radiation damage, and mitigate the need for transporting heavy materials into space, offering a potential solution to one of space exploration’s biggest challenges: reliable energy sources.
“The solar cells used in space now are amazing, reaching efficiencies of 30% to even 40%, but that efficiency comes with a price,” says lead researcher Felix Lang of the University of Potsdam, Germany. “They are very expensive and are relatively heavy because they use glass or thick foil as cover. It’s hard to justify lifting all these cells into space.”
Instead of hauling solar cells from Earth, Lang’s team is looking at materials available on the moon itself. They aim to replace Earth-made glass with glass crafted from lunar regolith —the moon’s loose, rocky surface debris. This change alone could cut a spacecraft’s launch mass by 99.4%, slash 99% of transport costs, and make long-term lunar settlements more feasible.
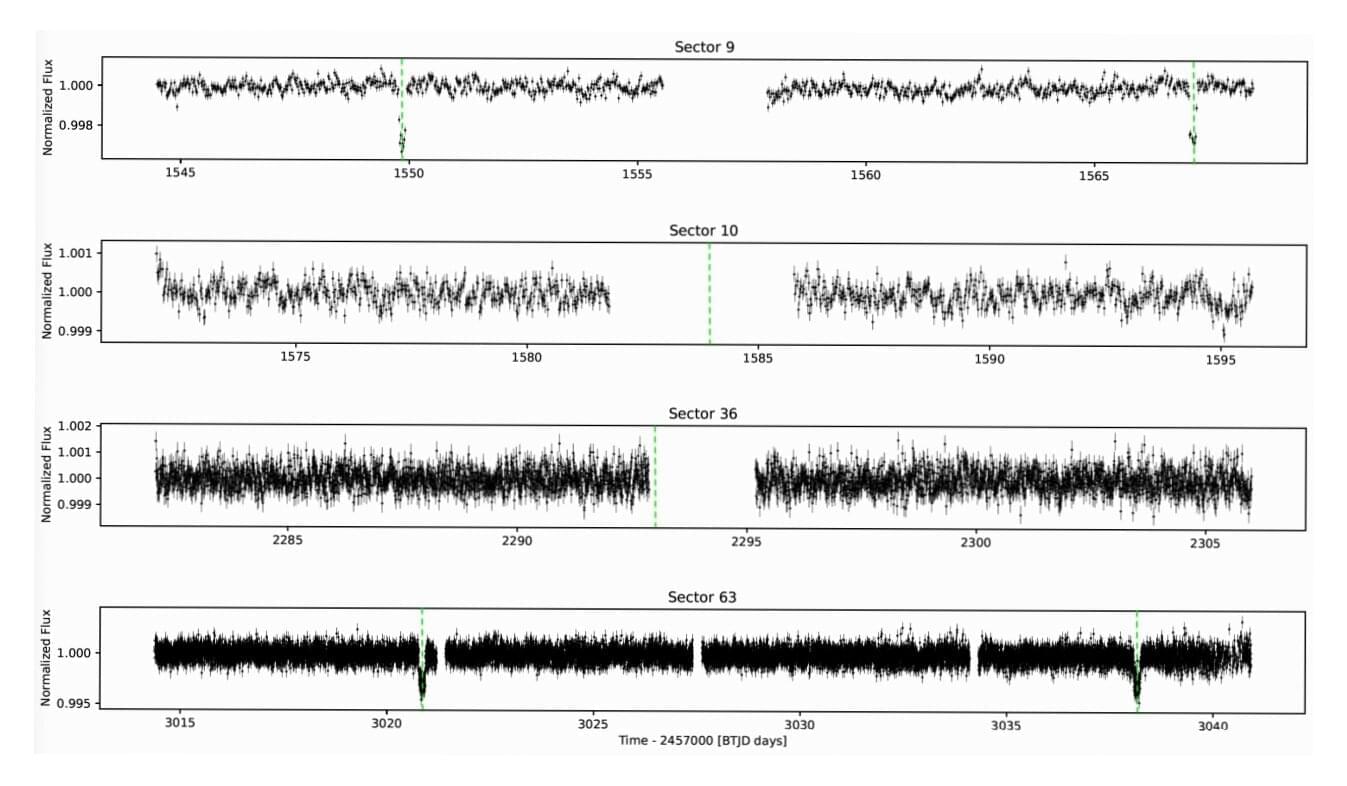
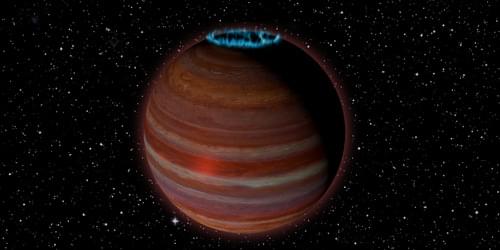
Using the Transiting Exoplanet Survey Satellite (TESS), an international team of astronomers has detected a new warm Jupiter exoplanet located more than 1,000 light years away. The newfound alien world, designated TOI-2005 b, is about the size of Jupiter and orbits its host star on a highly eccentric orbit. The discovery was reported March 25 on the arXiv pre-print server.
NASA’s TESS is conducting a survey of about 200,000 of the brightest stars near the sun with the aim of searching for transiting exoplanets. So far, it has identified over 7,500 candidate exoplanets (TESS Objects of Interest, or TOI), of which 620 have been confirmed so far.
Located some 1,070 light years away from the Earth, TOI-2005 is a rapidly rotating F-type star. It has recently been monitored with TESS and a transit signal was detected in its light curve. Now, a group of astronomers led by Allyson Bieryla of the Harvard-Smithsonian Center for Astrophysics (CfA) in Cambridge, Massachusetts, reports that this transit signal is of planetary nature.

Returning to Earth would be nothing without a warm welcome from (wo)man’s best friend.
Heartwarming footage captured the moment stranded Boeing Starliner astronaut Sunita Williams received a joyous reunion with her excited dogs after being stuck in space for 264 days.
Williams and fellow astronaut Barry “Butch” Wilmore finally departed the International Space Station, where they were stuck for more than nine months, and returned to Earth on March 18.
(https://twitter.com/WilliamShatner/status/1907056808730235247)
We’ve detected that JavaScript is disabled in this browser. Please enable JavaScript or switch to a supported browser to continue using x.com. You can see a list of supported browsers in our Help Center.
Terms of Service Privacy Policy Cookie Policy Imprint Ads info © 2025 X Corp.
This Product is supported by the NASA Heliophysics Education Activation Team (NASA HEAT), part of NASA’s Science Activation portfolio.
The material contained in this document is based upon work supported by a National Aeronautics And Space Administration (NASA) grant or cooperative agreement. Any questions, findings, conclusions or recommendations expressed in this materials are those of the author and do not necessarily reflect the views of NASA.
Without eclipses, our world would be a lot different because eclipses give us the ability to do science we otherwise wouldn’t be able to.
LEARN MORE
******
To learn more about this topic, start your googling with these keywords:
- Corona: the outermost part of the Sun’s atmosphere.
- General Relativity: a theory of gravitation developed by Albert Einstein that says that the observed gravitational effect between masses results from their warping of spacetime.
- Lunar Eclipse: an eclipse in which the moon appears darkened as it passes into the earth’s shadow.
- Solar Eclipse : an eclipse in which the sun is obscured by the moon.
- Tidal Friction: strain produced in a celestial body (such as the Earth or Moon) that undergoes cyclic variations in gravitational attraction as it orbits, or is orbited by, a second body.
CREDITS
*
Cameron Duke | Script Writer, Narrator and Director.
Sarah Berman | Illustration, Video Editing and Animation.
Nathaniel Schroeder | Music.
MinuteEarth is produced by Neptune Studios LLC
https://neptunestudios.info.
OTHER CREDITS
If we unite, we can reach the Age of Beyond.
BTS + Deleted Scenes: https://www.patreon.com/AzeAlter.
Written, Directed & Edited By.
Aze Alter.
Co-Produced By.
Nyukyung.
Voices & Sound Effects:
https://try.elevenlabs.io/gepcm3nse81b.
[Affiliate Link]
Video Created mainly with Luma:
https://lumalabsai.partnerlinks.io/u92ncdhx17tt.
[Affiliate Link]
LUMA LABS KLING RUNWAY ELEVEN LABS MINIMAX.