Image generated by Microsoft Designer Learn how you can use AI to add interactive charts to your chat experiences.


Inspired by the external skeleton of a spider, the robot leg is more flexible than conventional robots.
A small robot that resembles a spider’s leg has been developed by engineers at the University of Tartu. Inspired by nature, the fingernail-long leg is more flexible than conventional robots.
Its dexterous movements are expected to help people rescued from rubble and other danger zones in the future.
The robot leg modeled after the leg of a cucumber spider was created by researchers from the Institute of Technology of the University of Tartu and the Italian Institute of Technology. In the near future, it’s expected to move where humans cannot.

The AI system is dubbed a “quantum-tunneling deep neural network” and combines neural networks with quantum tunneling. A deep neural network is a collection of machine learning algorithms inspired by the structure and function of the brain — with multiple layers of nodes between the input and output. It can model complex non-linear relationships and, unlike conventional neural networks (which include a single layer between input and output) deep neural networks include many hidden layers.
Quantum tunneling, meanwhile, occurs when a subatomic particle, such as an electron or photon (particle of light), effectively passes through an impenetrable barrier. Because a subatomic particle like light can also behave as a wave — when it is not directly observed it is not in any fixed location — it has a small but finite probability of being on the other side of the barrier. When sufficient subatomic particles are present, some will “tunnel” through the barrier.
After the data representing the optical illusion passes through the quantum tunneling stage, the slightly altered image is processed by a deep neural network.
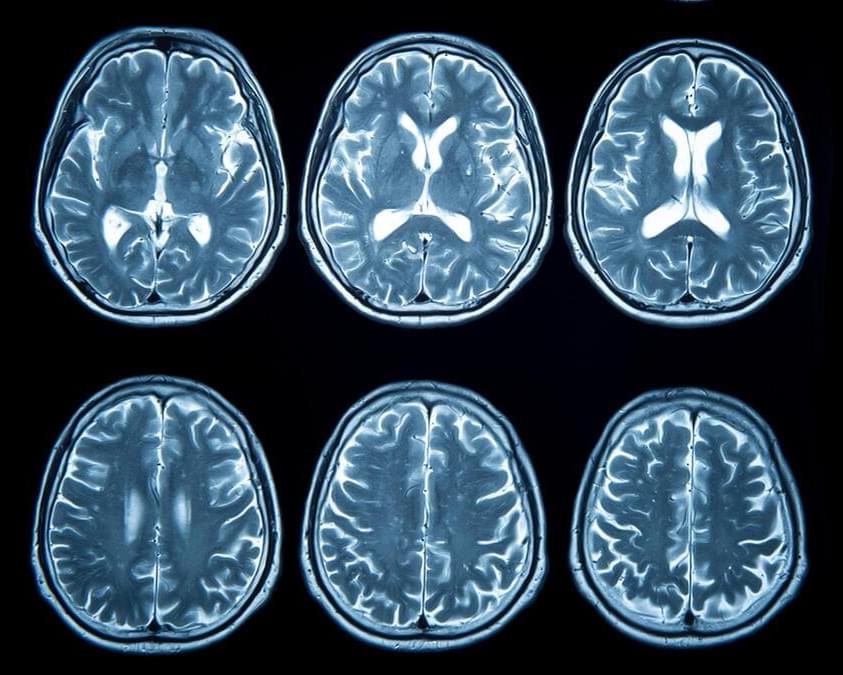
One prevailing hypothesis is that physical fitness mitigates structural brain changes that contribute to cognitive decline. Recent evidence points to a potential role involving myelin —the insulating sheath surrounding neurons that is crucial for efficient neural signaling and overall cognitive health. Myelination facilitates rapid signal transmission and supports neural network integrity.
The degeneration of myelin in the brain is increasingly recognized as a critical factor contributing to disruptions in neural communication, which may play a significant role in the cognitive decline observed in Alzheimer’s disease and other neurodegenerative disorders. Emerging research suggests that myelin breakdown may even precede the formation of amyloid-beta plaques and neurofibrillary tangles—the hallmark pathological features of Alzheimer’s disease. Advanced imaging studies have detected early myelin degeneration in individuals who later develop Alzheimer’s, indicating that myelin damage could be an initial event in the disease’s progression.
Age-related deterioration of myelin is closely associated with cognitive decline. Reduced white matter integrity—often resulting from myelin damage—is correlated with declines in memory, executive function, and processing speed in older adults. As myelin degradation leads to the slowing of cognitive processes and disrupts the synchronization of neural networks, preserving myelin integrity is essential for sustaining cognitive health across the lifespan.

27K likes, — logicure on October 3, 2024: Ballie is a soccer ball-sized, yellow, spherical AI-powered robot created by Samsung Electronics that can navigate homes and perform tasks such as controlling smart home devices, projecting images, and communicating with users.
Ballie was first introduced at CES 2020 and an upgraded version was unveiled at CES 2024.
Follow @logicure for more amazing content.



Automatically interpreting millions of features in large language models.
Gonçalo Paulo, Alex Mallen, Caden Juang, Nora Belrose Eleuther AI 2024 https://arxiv.org/abs/2410.13928 https://github.com/EleutherAI/sae-auto-interp
We’re on a journey to advance and democratize artificial intelligence through open source and open science.
{kind=link}